

Penarik elektronik WLB-10KN mengguna pakai sistem kawalan servo, boleh merealisasikan pemuatan anjakan seragam dan pemuatan daya seragam dua mod pemuatan, kecekapan tinggi dan kestabilan yang baik.
1. Penggunaan utama dan skop aplikasi
Penarik elektronik WLB-10KN menggunakan sistem kawalan servo, boleh merealisasikan pemuatan anjakan seragam dan pemuatan daya seragam dua mod pemuatan, kecekapan tinggi dan kestabilan yang baik. Dengan fungsi dwi sensor, julat pengukuran lebih luas, ketepatan lebih tinggi, dan penggunaan lebih fleksibel dan mudah. Kawalan skrin sentuh, antara muka operasi manusia-mesin adalah mesra. Instrumen lukisan dilengkapi dengan had perjalanan dan fungsi perlindungan beban lampau nilai daya positif dan negatif, yang boleh menghalang kerosakan peralatan yang disebabkan oleh salah operasi.
Ia sesuai untuk ujian kekuatan tegangan dan ikatan mortar campuran kering, bahan penebat, dinding seramik dan pelekat jubin lantai, cat bangunan berlamina dan dempul yang digunakan untuk membina dinding luar. Ia mematuhi ujian kekuatan ikatan pelbagai bahan binaan yang ditetapkan oleh JC/T547-2005, GB/T9779-2005, JG/T157-2004.
Ciri utama:
1) Kawalan skrin sentuh, antara muka mesra pengguna.
2) Pemacu servo, pemuatan anjakan seragam berterusan dan pemuatan daya seragam.
3) Dengan fungsi dwi penderia, konfigurasi standard ialah satu penderia.
4) Mengangkat pantas dan fungsi pemulangan automatik satu kekunci apabila tiada beban.
5) Fungsi perlindungan beban lampau bagi had perjalanan dan nilai daya positif dan negatif.
6) Kedudukan pantas dalam arah X-Y, terutamanya sesuai untuk pengesanan berbilang sampel pada plat ujian.
7) Dilengkapi dengan pengapit satu titik, mudah untuk ujian sampel tunggal.
8) Kepala kad T bersama untuk memudahkan kedudukan dan pemuatan spesimen.
9) Tekan alih untuk mengelakkan lenturan dan ubah bentuk bahan ujian. (bukan standard)
2. Penunjuk teknikal utama
1) Daya percubaan maksimum: 10000N
2) Muatan peleraian: 0.1N
3) Julat pengesanan berkesan: 1%-100% daripada daya percubaan maksimum
4) Muatkan ketepatan ukuran: dalam ±0.5% daripada nilai yang ditunjukkan
5) Kaedah lukisan: kawalan nilai daya, kawalan anjakan dan kaedah kawalan lain
6) Julat kelajuan lukisan: 0.1mm-300mm /min
7) Julat lebar spesimen: 70-500mm
8) Ketebalan maksimum spesimen: 50mm
9) Lejang maksimum kepala ujian: 100mm
3. Keadaan persekitaran kerja
3.1 Dalam julat suhu bilik 100C ~ 350C, kelembapan relatif tidak melebihi 80%;
3.2 Pasang dengan betul pada asas yang kukuh atau meja kerja dengan kerataan 0.2/1000;
3.3 Dalam persekitaran tanpa getaran, media menghakis dan gangguan medan elektromagnet yang kuat;
3.4 Julat turun naik voltan bekalan kuasa tidak boleh melebihi ±10% daripada voltan terkadar.
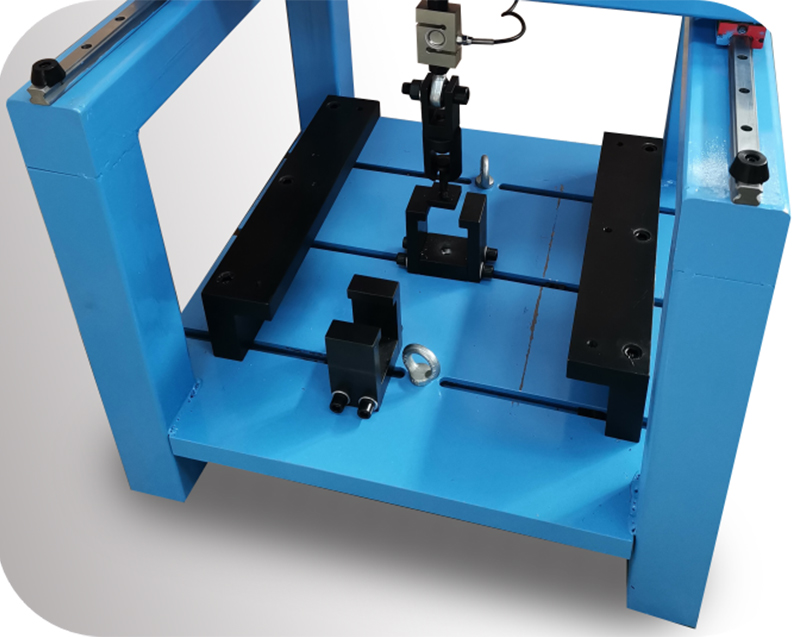
4. Struktur utama
4.1 Menyambung Bekalan Kuasa
Seperti yang ditunjukkan dalam rajah, masukkan bekalan kuasa rawak ke dalam port kuasa, hidupkan butang kuasa hadapan dan kabel penderia disambungkan sebelum penghantaran.

4.2 Pelarasan kedudukan percubaan
Seperti yang ditunjukkan dalam rajah di atas, mengikut bilangan blok ujian, anda boleh memasang lekapan tegangan satu titik (rawak dengan 10 keping), membetulkan kedudukan lekapan dan kemudian melaraskan kedudukan kepala tarik secara manual , ujian, chuck tegangan adalah sejagat sfera, boleh dijajarkan secara automatik, sesuai untuk pelbagai kedudukan penempatan.
Terdapat butang [suis kuasa] di hujung kanan peranti untuk menghidupkan atau memotong peranti dan plat penutup kuasa luaran merah [suis berhenti kecemasan], hijau [penunjuk kuasa].
Selepas hos dimatikan, putar butang [suis kuasa], sistem dihidupkan dan lampu [penunjuk kuasa] hijau dihidupkan. Peranti boleh berjalan.
Jika berlaku kecemasan, tekan [suis berhenti kecemasan] merah untuk memutuskan bekalan kuasa hos.
5. Pemasangan dan pelarasan
5.1 Keluarkan peralatan daripada bungkusan dan semak sama ada terdapat sebarang perlanggaran atau kerosakan semasa pengangkutan.
5.2 Letakkan peralatan pada platform pepejal atau pelantar simen, dan laraskan aras supaya berada dalam kedudukan mendatar (levelness 0.2/1000);
5.3 Sistem bekalan kuasa hendaklah 220VAC±10%/50Hz, dan hendaklah mempunyai ukuran pembumian yang boleh dipercayai.
6. Penggunaan dan pengendalian
6.1 Persediaan:
6.1.1 Sambungkan semua kabel peranti dengan betul, kemudian hidupkan.
6.1.2 Panaskan 5minit;
6.1.3 Kosongkan tetingkap paparan daya ujian kepada sifar.
6.2 Untuk spesimen dengan spesifikasi berbeza, sila gantikan lekapan yang berbeza.
6.3 Pengenalan dan penerangan bagi setiap butang operasi dipaparkan pada skrin peranti
Gambar rajah antara muka operasi (seperti berikut):

6.3.1 Fungsi kekunci Muka:
Paparan kristal cecair: paparan nilai daya, puncak, anjakan, kelajuan, gesaan, lengkung ujian, dsb.
Skrin LCD ialah skrin sentuh dan semua fungsi ujian boleh diselesaikan dengan mengklik teks atau gambar pada skrin LCD.
6.3.2 Butiran:
Perkara berikut memperincikan paparan dan fungsi setiap skrin, diselangi dengan penggunaan butang.

Ini ialah skrin yang dimasukkan terus selepas but, klik pada skrin atau klik mana-mana kekunci. Skrin seterusnya dipaparkan, seperti yang ditunjukkan dalam Rajah 2:

Dalam Rajah 2, terdapat * sebelum "ujian tegangan", menunjukkan bahawa kaedah ujian yang dipilih pada masa ini ialah ujian tegangan.
Mengklik pada mana-mana baris pada skrin menunjukkan bahawa kaedah ujian yang sepadan dipilih. Kekunci
Di sini diandaikan bahawa "ujian tegangan" dipilih, klik OK pada skrin atau tekan kekunci

Dalam gambar yang ditunjukkan dalam Rajah 3, klik "Ujian" atau tekan kekunci

Dalam Rajah 4, klik "speed up" dan "speed down" untuk menukar kelajuan, dan butang
Kembali ke Rajah 3, klik Tetapan di penjuru kiri sebelah atas skrin atau tekan

Dalam Rajah 5, klik "Pemilihan kaedah ujian" untuk beralih ke skrin seperti yang ditunjukkan dalam Rajah 2.
Kembali ke Rajah 5, klik "Penentukuran sistem", gesa untuk memasukkan kata laluan, seperti ditunjukkan dalam Rajah 6:

Masukkan kata laluan 111 dan klik OK untuk memasukkan Rajah 7:
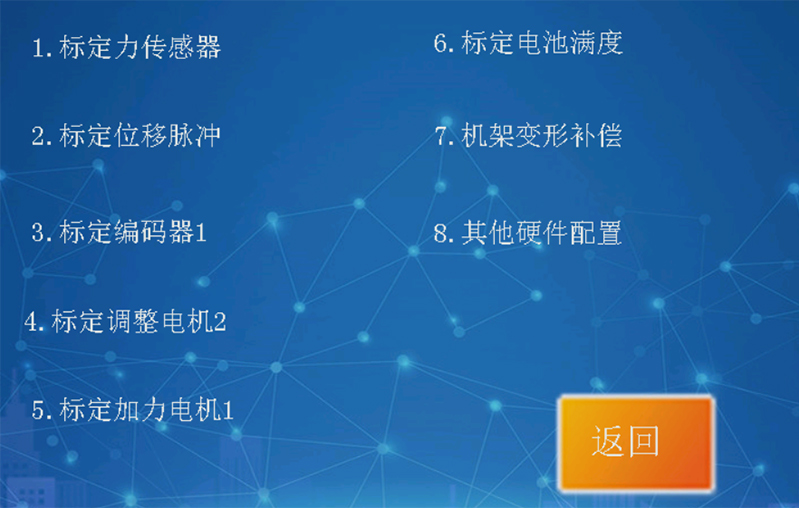
Tiga parameter: daya, anjakan, kelajuan mesti ditentukur sebelum digunakan, jika tidak, tidak tepat.
Antara ketiga-tiga parameter ini, jujukan penentukuran hendaklah sesaran dahulu, kemudian kelajuan, dan akhirnya daya.
Dua konsep: anjakan dan ubah bentuk.
Anjakan ialah sejauh mana rasuk ujian bergerak.
Ubah bentuk ialah ubah bentuk spesimen selepas ditekankan, dan ubah bentuk boleh diukur dengan extensometer khas atau dengan anjakan. Mengambil buih tegar mampat sebagai contoh, semasa pergerakan ke bawah indenter atas, anjakan terus meningkat dan ubah bentuk adalah sifar sebelum bersentuhan dengan spesimen; selepas bersentuhan dengan spesimen, ubah bentuk meningkat dan anjakan juga meningkat, dan jumlah anjakan tolak strok kosong sebelum bersentuhan dengan spesimen ialah ubah bentuk. Ini adalah prinsip asas untuk mengukur ubah bentuk dengan sesaran.
Papan kawalan utama menyokong tiga saluran input nadi, iaitu nadi 0, nadi 1, nadi 2.
Nadi 0 disambungkan kepada nadi keluaran motor pada papan litar, untuk motor pelangkah atau motor servo AC, terdapat nadi pemacu motor, nadi 0 dikira, nadi 0 mencerminkan bilangan langkah putaran motor, putaran motor memacu rasuk untuk bergerak, nadi 0 adalah berkadar dengan anjakan.
Pulse 1 dan pulse 2 ialah antara muka pengekod ortogon yang lengkap dengan input pin luaran.
Klik "Nadi anjakan penentukuran" untuk memaparkan Rajah 8:

Mengukur anjakan memerlukan pembaris atau penunjuk dail.
Masukkan sebarang kelajuan (apabila kelajuan tidak tepat dan tidak diperlukan), motor naik atau turun untuk menghidupkan motor, ambil pembaris sebagai standard, biarkan rasuk bergerak pada jarak tertentu, seperti 20 mm, lihat ukuran nombor nadi, dengan andaian 2400, maka panjang standard diisi dalam 20, nombor nadi yang sepadan diisi dalam 2400, klik simpan, anjakan penentukuran selesai.
Penentukuran pengekod 1 dan pengekod 2 adalah serupa dan tidak akan diterangkan lagi.
Klik "Kelajuan Penentukuran" dalam Rajah 7 untuk memaparkan seperti yang ditunjukkan dalam Rajah 9:
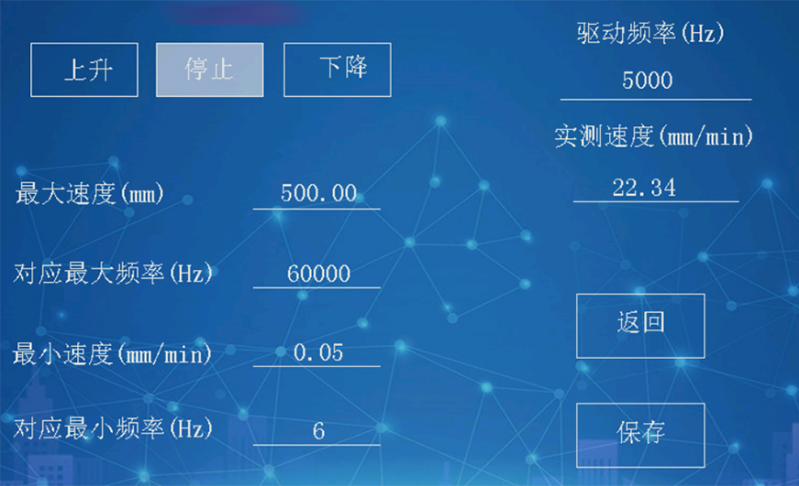
Dalam Rajah 9, masukkan sebarang kekerapan pemacu, seperti 10000, klik atas atau bawah dan semak kelajuan yang diukur tiga saat kemudian. Jika kelajuan yang diukur adalah kurang daripada kelajuan maksimum yang diperlukan oleh peranti, ubah suai kekerapan pemacu dan cuba lagi sehingga kelajuan yang diukur lebih besar daripada kelajuan maksimum yang diperlukan oleh peranti. Andaikan bahawa kelajuan yang diukur ialah 504 apabila kekerapan pemacu ialah 64000.
Kemudian berhenti, isi empat nombor di sebelah kiri, kelajuan maksimum ialah 504, sepadan dengan kekerapan maksimum ialah 64,000, kelajuan minimum ialah 0.05(0.05 ialah 504 dibahagikan dengan 10000), kekerapan minimum yang sepadan ialah 6 ( 6 ialah 64,000 dibahagikan dengan 10000). Nisbah kelajuan dikira pada 1:10,000.
Klik pada "Kalibrasi daya sensor" dalam Rajah 7, yang dipaparkan seperti yang ditunjukkan dalam Rajah 10:

Dalam Rajah 10, sediakan dinamometer standard, isikan setiap daya titik mengikut julat pengukuran sensor daya terlebih dahulu, dengan mengandaikan bahawa julat pengukuran sensor ialah 500N, maka titik daya boleh menjadi 10,20,50,100,200,500 , mesti memastikan bahawa daya disusun dalam kuasa menaik, dan daya keenam ialah julat pengukur daripada sensor itu. Apabila sensor tidak ditekankan, klik
Dalam Rajah 7, klik "Tentukur penderia daya lain" untuk dipaparkan seperti yang ditunjukkan dalam Rajah 11:

Mesin boleh menyokong 3 lagi penderia daya dalam bentuk yang boleh ditukar ganti, dan kaedah penentukuran adalah serupa dengan penderia daya pertama, jadi ia tidak akan diterangkan lagi.
Klik "Bantuan" dalam Rajah 5 dan skrin bantuan akan dipaparkan, terutamanya takrifan setiap sambungan.
Pilih kaedah ujian dalam Rajah 2 dan klik "Tetapkan" untuk memasuki halaman tetapan parameter kaedah ujian.
Parameter ini dipanggil parameter persediaan dan parameter yang diterangkan dalam penentukuran sebelumnya dipanggil parameter penentukuran.
Parameter penentukuran ditetapkan oleh kilang untuk menentukan ketepatan instrumen dan pengguna tidak boleh mengubah suai sesuka hati, jadi ia dilindungi kata laluan. Parameter tetapan boleh diubah suai oleh pengguna mengikut penggunaan. Parameter ini tidak menjejaskan ketepatan peranti. Tiada kata laluan diperlukan.
Berikut mengambil ujian tegangan sebagai contoh. Parameter tetapan ujian tegangan ditunjukkan dalam Rajah 12 hingga Rajah 19

Rajah 12
Rajah 13
Rajah 14
Rajah 15
Rajah 16
Rajah 17
Rajah 18
Rajah 19
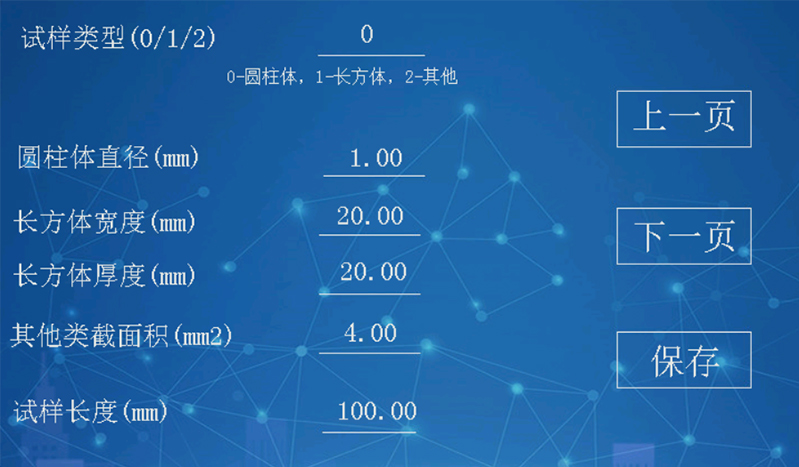
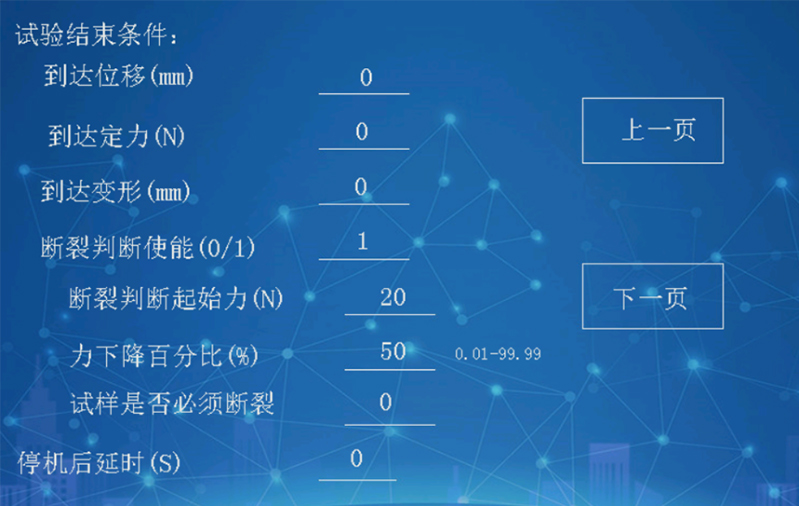
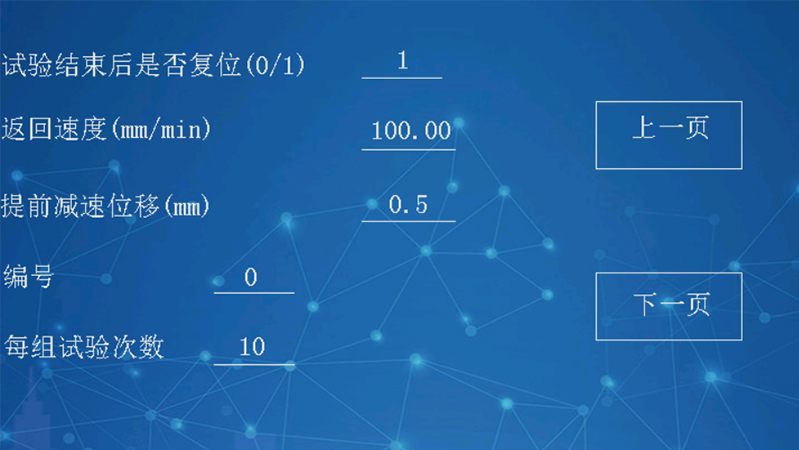
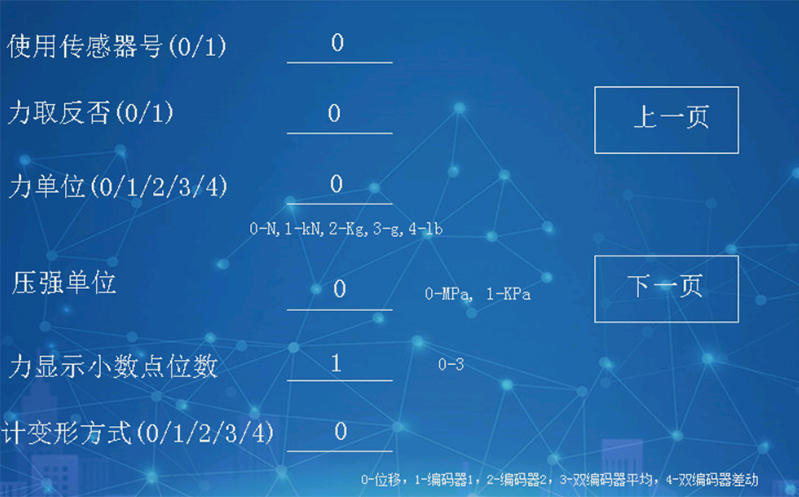
Dari Rajah 12 hingga Rajah 19, parameter ditetapkan, yang diterangkan seperti berikut:
Jenis sampel terbahagi kepada tiga jenis. Jika jenis sampel ialah 0, parameter diameter adalah sah dan sistem akan mengira secara automatik luas keratan rentas mengikut diameter
Jika jenis sampel ialah 1, parameter lebar dan ketebalan adalah sah dan sistem akan mengira secara automatik keluasan keratan rentas mengikut lebar dan ketebalan.
Jika jenis sampel ialah 2, luas keratan rentas jenis lain adalah sah.
Daya dibahagikan dengan luas keratan rentas adalah sama dengan kekuatan. Luas keratan rentas betul dan kekuatannya betul.
Panjang sampel digunakan untuk mengira pemanjangan.
Titik rendah dan tinggi bagi segmen anjal digunakan untuk mengira modulus anjal (lihat GB/T228-2010). Kedua-dua saiz khusus yang bernilai adalah berkaitan dengan sampel. Secara umum, titik rendah hendaklah ditetapkan pada kira-kira 15% daripada daya maksimum, dan titik tinggi hendaklah ditetapkan pada kira-kira 30% daripada daya maksimum, jadi nilai daya maksimum harus dianggarkan sebelum ujian. Tetapkan dua titik ini mengikut anggaran daya maksimum. (Perisian komputer boleh merekodkan keseluruhan proses ujian, tidak perlu menganggarkan)
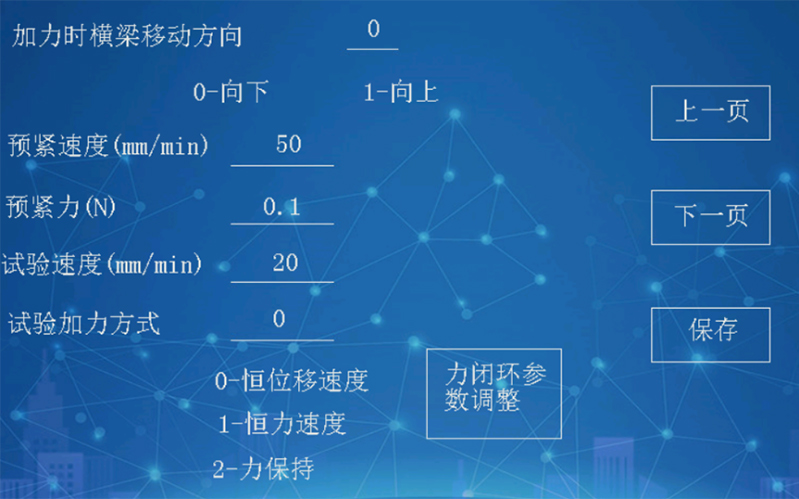
Arah pergerakan selepas paksa 0- ke bawah, 1- ke atas
Mulakan kelajuan anjakan, jika kaedah mengenakan daya ialah kelajuan anjakan malar, maka berikut ialah kelajuan ujian.
Jika daya pretensi ditetapkan kepada 50N, ini bermakna sampel menjadi lurus apabila daya ialah 50N dan titik permulaan untuk mengira ubah bentuk ialah 0.1N secara lalai
Mod daya: Kelajuan anjakan malar, motor pelangkah dan motor servo AC boleh menyediakan mod daya lalai.
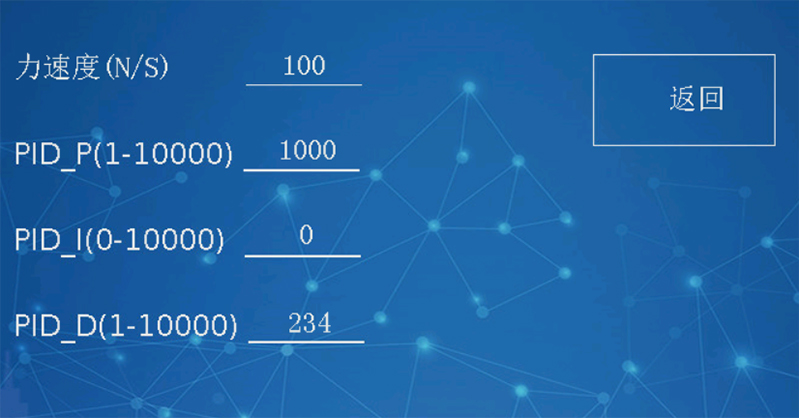
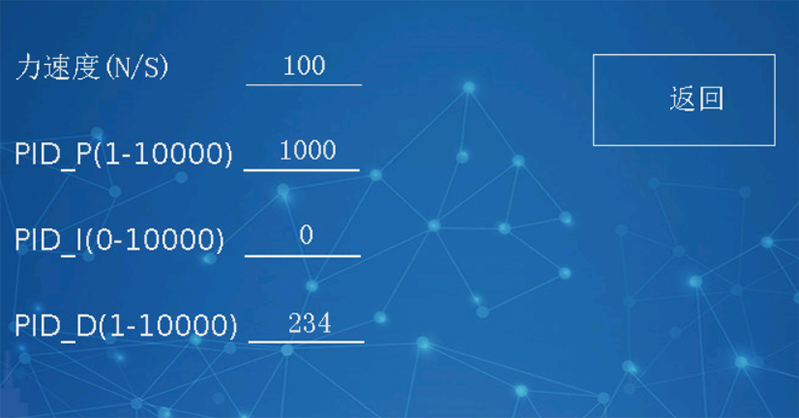
Kelajuan daya malar, cara ini memerlukan penggunaan maklum balas daya, juga dikenali sebagai algoritma gelung tertutup daya, terdapat pelbagai algoritma gelung tertutup daya, berikut ialah penggunaan algoritma PID, perlu menetapkan parameter PID terlebih dahulu. Proses menetapkan parameter PID yang sesuai dipanggil penalaan parameter PID.
Klik [Paksa Pelarasan parameter gelung tertutup] dalam Rajah 14 untuk memaparkan Rajah 20
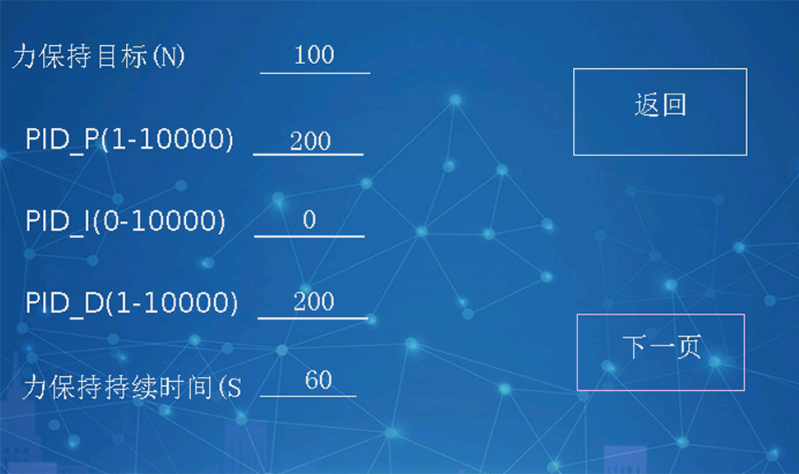
Penyelenggaraan daya berterusan juga menggunakan algoritma PID, seperti ditunjukkan dalam Rajah 21
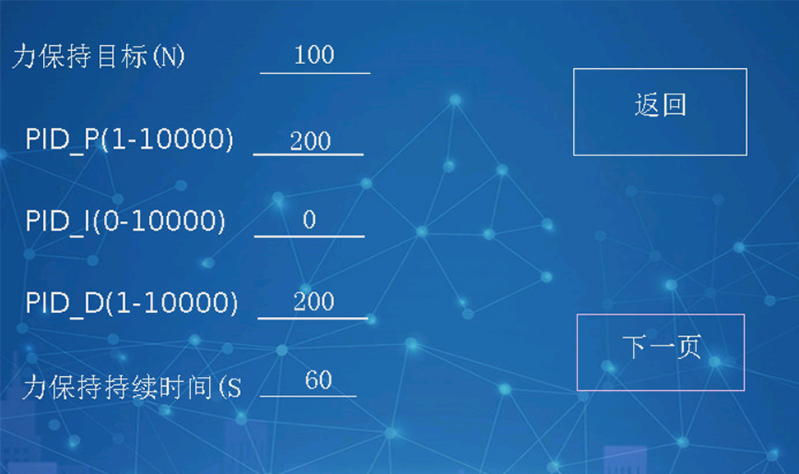
Nota: Dalam ujian tegangan, kaedah pengekalan daya malar tidak berfungsi, hanya dalam ujian pengekalan daya.
7. Langkah berjaga-jaga
7.1 Sebelum memulakan sistem buat kali pertama, semak ketepatan kabel dan bekalan kuasa input. Bekalan kuasa ialah 220V±50Hz dan dibumikan dengan betul.
7.2 Sebelum ujian, sila tetapkan parameter ujian dengan betul untuk memastikan ketepatan data ujian.
7.3 Semasa ujian, sila lakukan ujian mengikut kaedah yang betul.
8. Kesilapan dan penyelesaian masalah biasa
| Oleh itu, penampilan disekat | Punca dan rawatan |
| Tiada paparan dipaparkan selepas peranti dihidupkan | Kord kuasa pengawal, keselamatan, suis, dll |
| Mulakan tiada tindakan | Bekalan kuasa hos, keselamatan, suis, kabel kawalan |
| Selepas memuatkan, daya ujian tidak ditunjukkan | Penderia disambungkan dengan betul |
| Memaksa kestabilan | Periksa kabel pembumian sistem |
| Penggera bunyi panjang | Penderia terlebih muatan atau talian penderia putus |

































