

PDS -1 sistem pemuatan berbilang saluran (selepas ini dirujuk sebagai mesin ujian) ialah salah satu daripada siri produk mesin ujian universal dinamik dan statik yang dibangunkan oleh syarikat kami.
1. Pengenalan produk
Sistem pemuatan berbilang saluran PDS-1 (selepas ini dirujuk sebagai mesin ujian) ialah salah satu siri produk mesin ujian universal dinamik dan statik yang dibangunkan oleh syarikat kami. Semasa proses pembangunan dan pembangunan mesin ujian, syarikat menerima pakai pengalaman pembangunan dan pembuatan syarikat mesin ujian dinamik yang terkenal di peringkat antarabangsa, mengguna pakai konsep pembangunan "unitisasi, modularisasi dan penyeragaman", menyerap teknologi mesin ujian dinamik elektromagnet termaju antarabangsa. , dan direka bentuk mengikut situasi penggunaan sebenar pengguna domestik.
Hos mesin ujian, kabinet kawalan elektrik, pengawal servo digital penuh, perisian kawalan khas berbilang saluran dan komponen utama lain direka dan dikeluarkan oleh syarikat kami, bekalan kuasa, modul skrin sentuh, penyentuh dan bahagian penting lain yang dibeli dipilih produk serupa antarabangsa atau domestik dalam jenama terkenal, meningkatkan kestabilan dan kebolehpercayaan sistem.
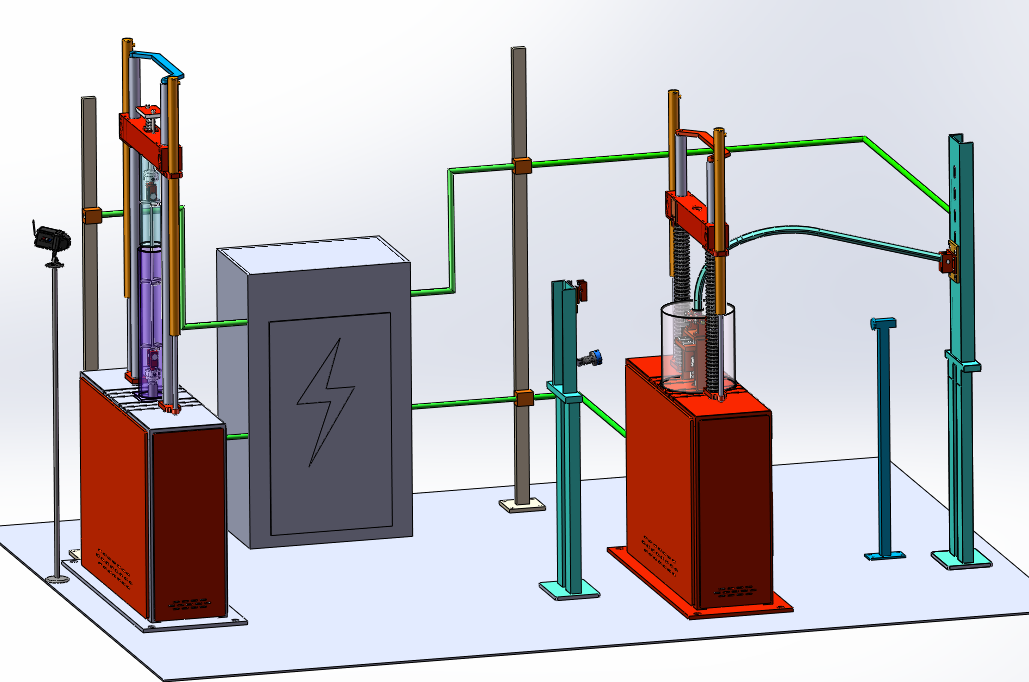
1) Gambaran Keseluruhan Sistem
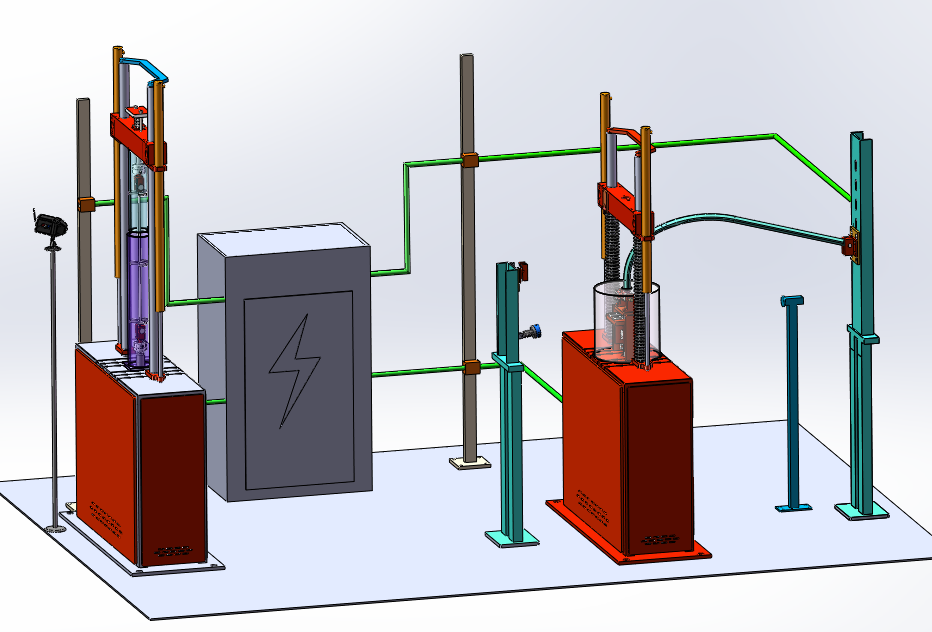
Sistem pemuatan berbilang saluran PDS-1 digunakan untuk ujian kelesuan rentetan kereta api berkelajuan tinggi yang digantung. Mesin ujian terdiri daripada mesin utama (penggerak linear elektromagnet 1KN menentang atas dan bawah), aksesori ujian, sumber semasa, peranti perlindungan penebat, peranti pemuatan beban sisi, kabinet kuasa penuh, sistem kawalan servo saluran tunggal digital penuh, pencetak komputer , perisian ujian dan aksesori lain yang diperlukan.

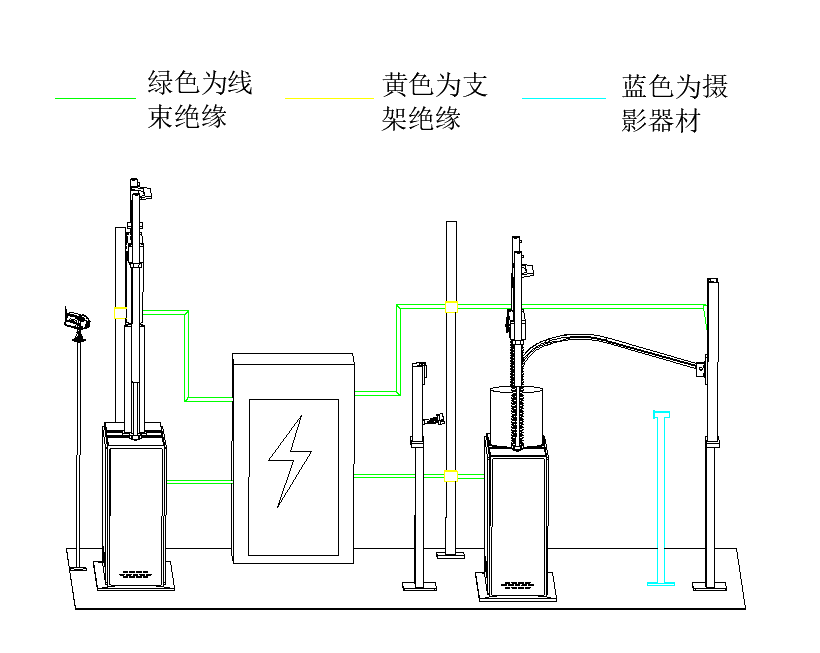
1.1 Prinsip kerja sistem adalah seperti berikut:
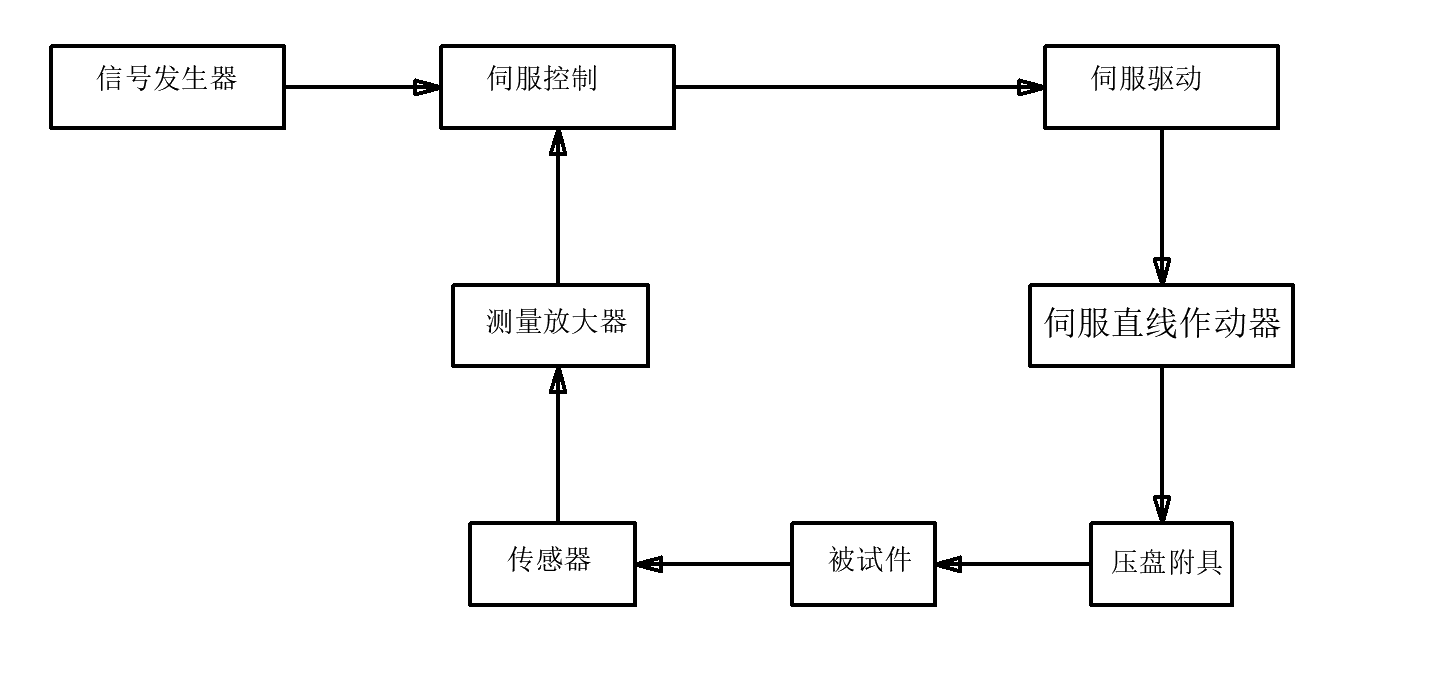
1.2 Gambar rajah blok kawalan sistem adalah seperti berikut
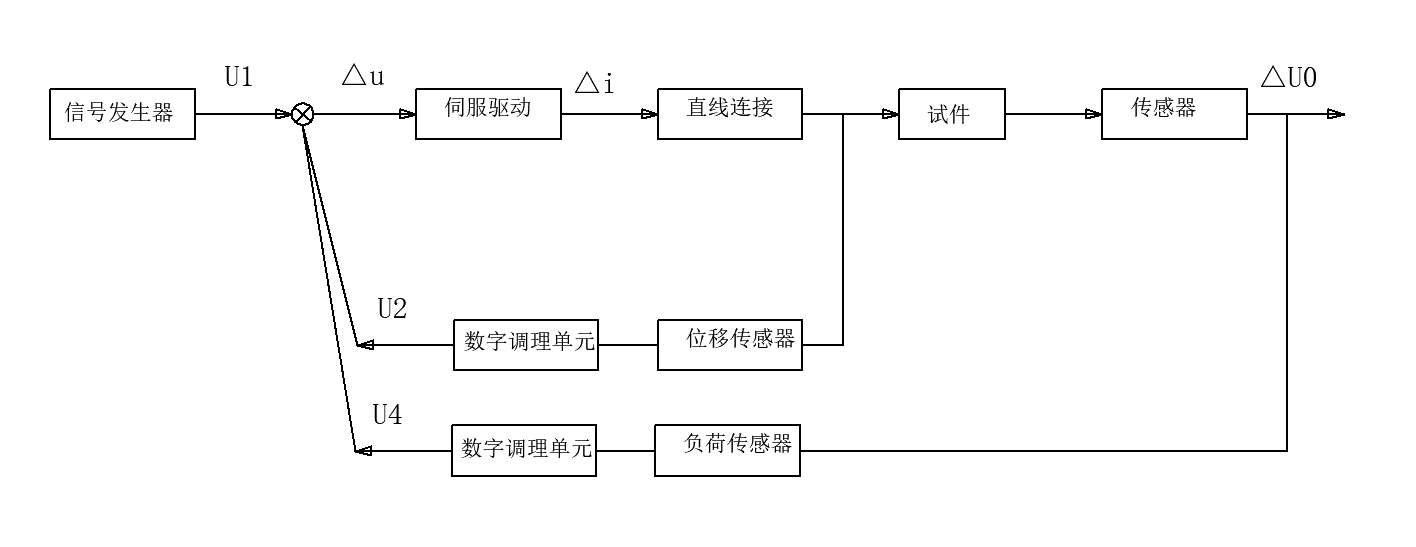
(Rajah skematik adalah untuk rujukan sahaja)
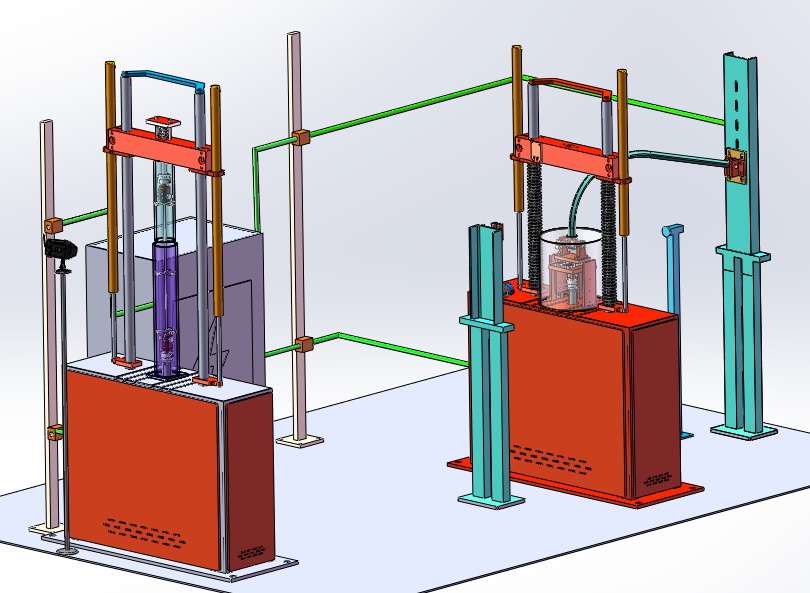
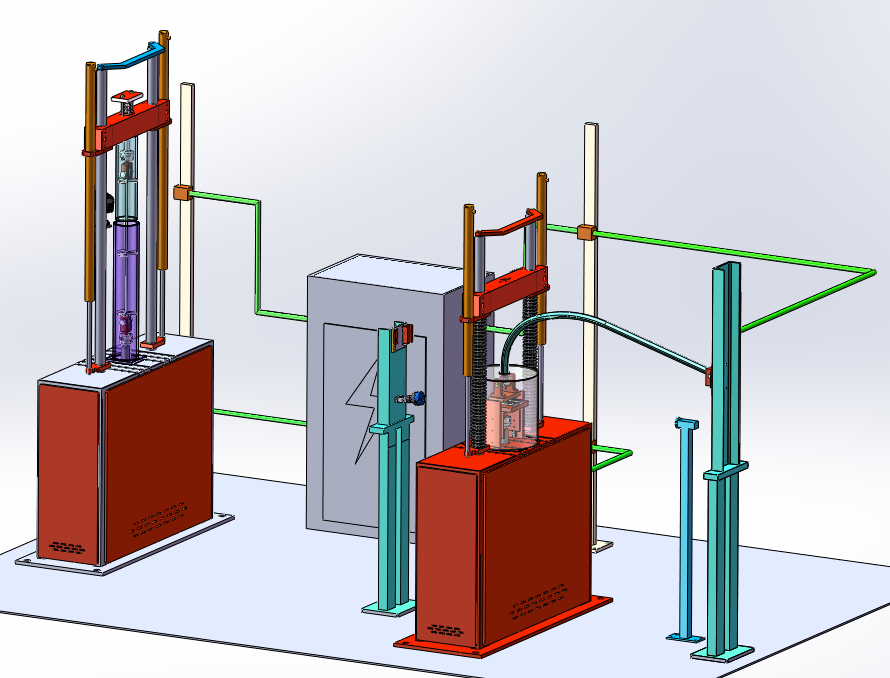
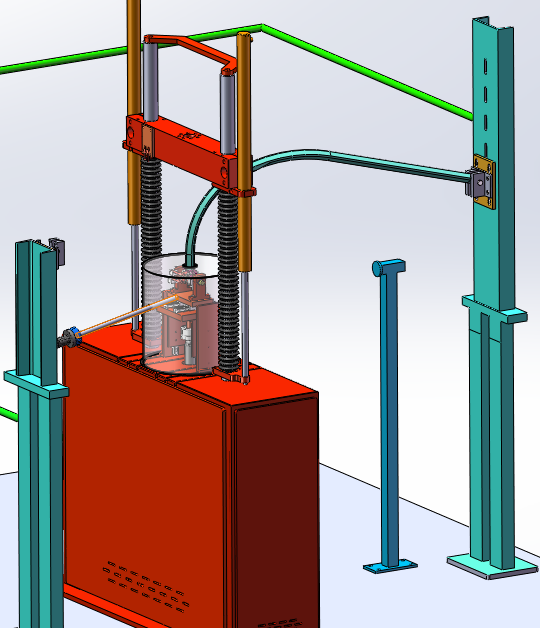
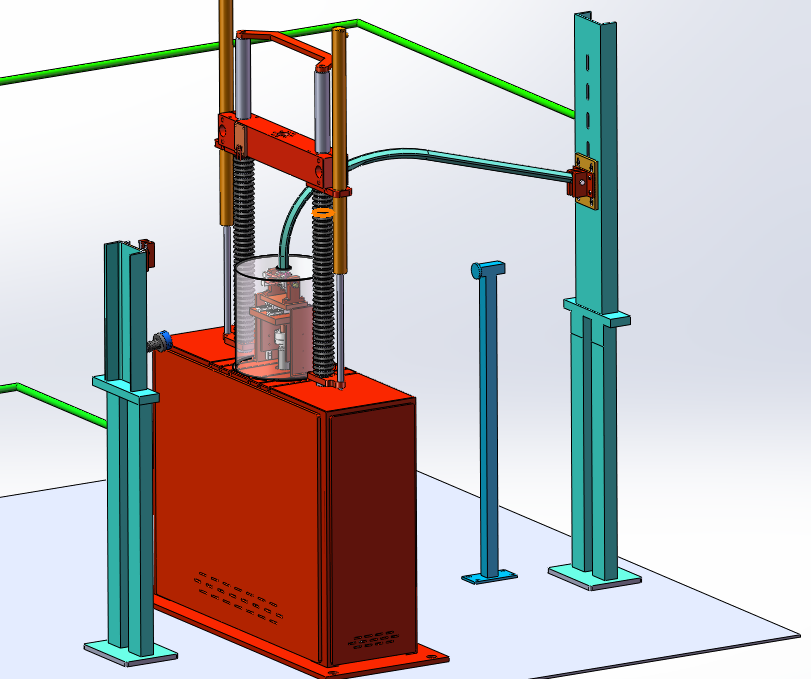
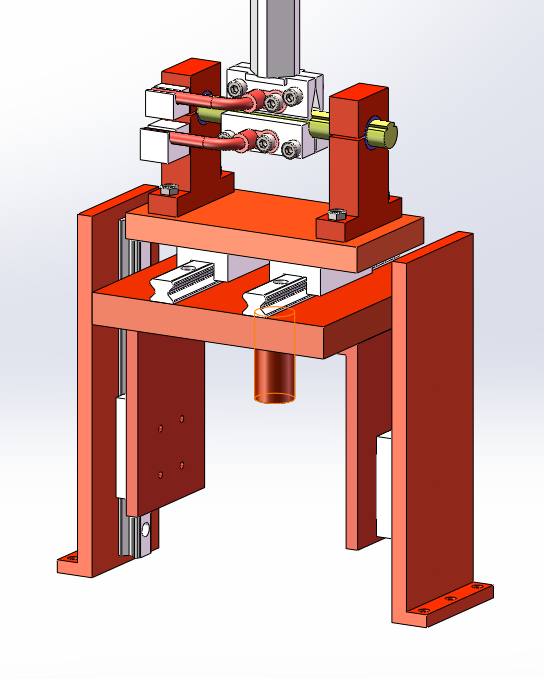
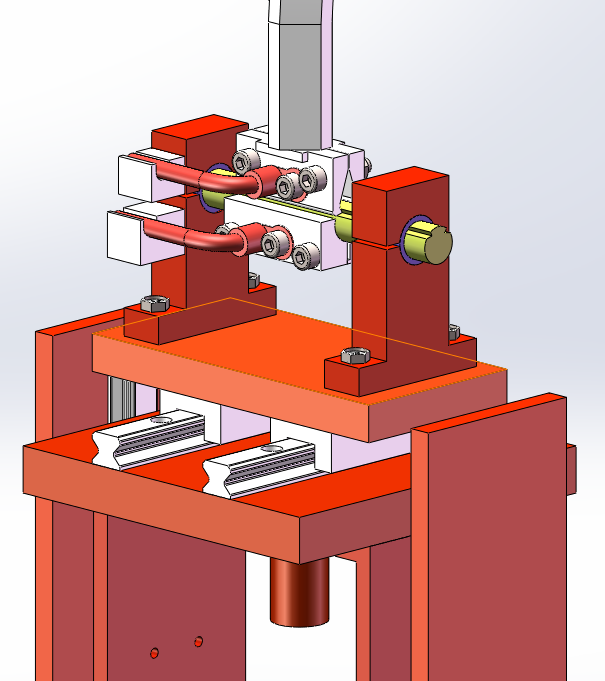
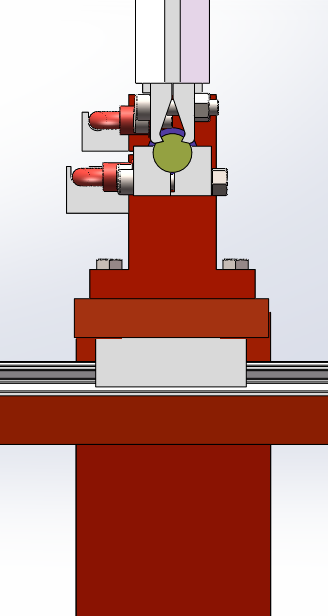
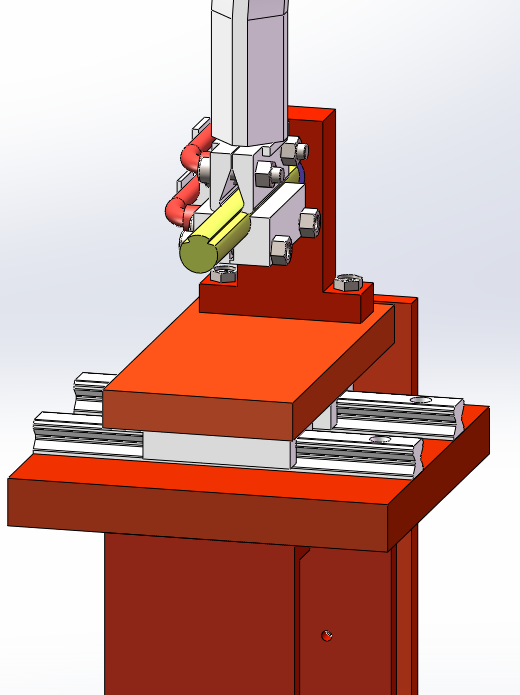
1.3 Hos sistem Imej rujukan adalah seperti berikut
1.4 Mesin utama ialah struktur rangka 2 lajur, dan penggerak linear elektromagnet 1KN dipasang pada rasuk mesin utama dan bahagian bawah meja kerja. Lekapan ujian masing-masing dipasang pada bahagian atas dua rod omboh penggerak. Pelarasan rasuk hos mengamalkan pengangkatan elektrik, pengapit mekanikal, struktur pelepasan anjal, untuk memastikan rasuk stabil dan boleh dipercayai semasa ujian, dan memastikan rasuk kekal terkunci dalam keadaan bukan ujian. Permukaan luar lajur dirawat dengan penyaduran kromium keras, yang boleh meningkatkan keupayaan anti-haus lajur secara berkesan, meningkatkan keupayaan anti-karat, dan meningkatkan keindahan badan utama.
1.5 Pergerakan rasuk (mengangkat dan mengunci) dikawal oleh modul pemacu rasuk, dua peranti pengapit dan dua skru plumbum diselaraskan untuk menyelesaikan kerja, dan modul pemacu menggunakan kawalan injap manual, kebocoran sifar , mudah dan boleh dipercayai.
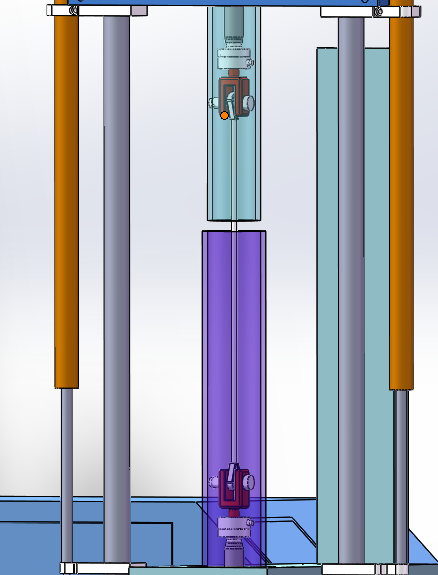
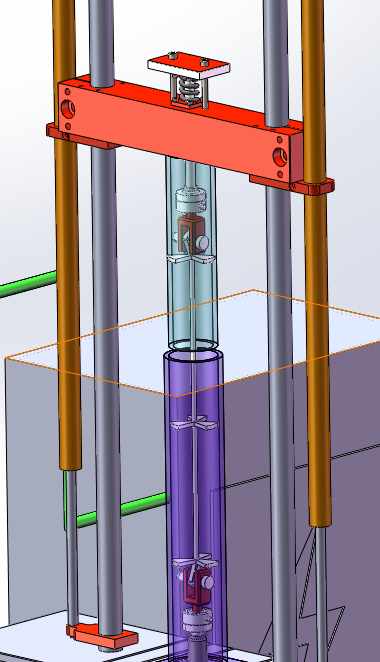
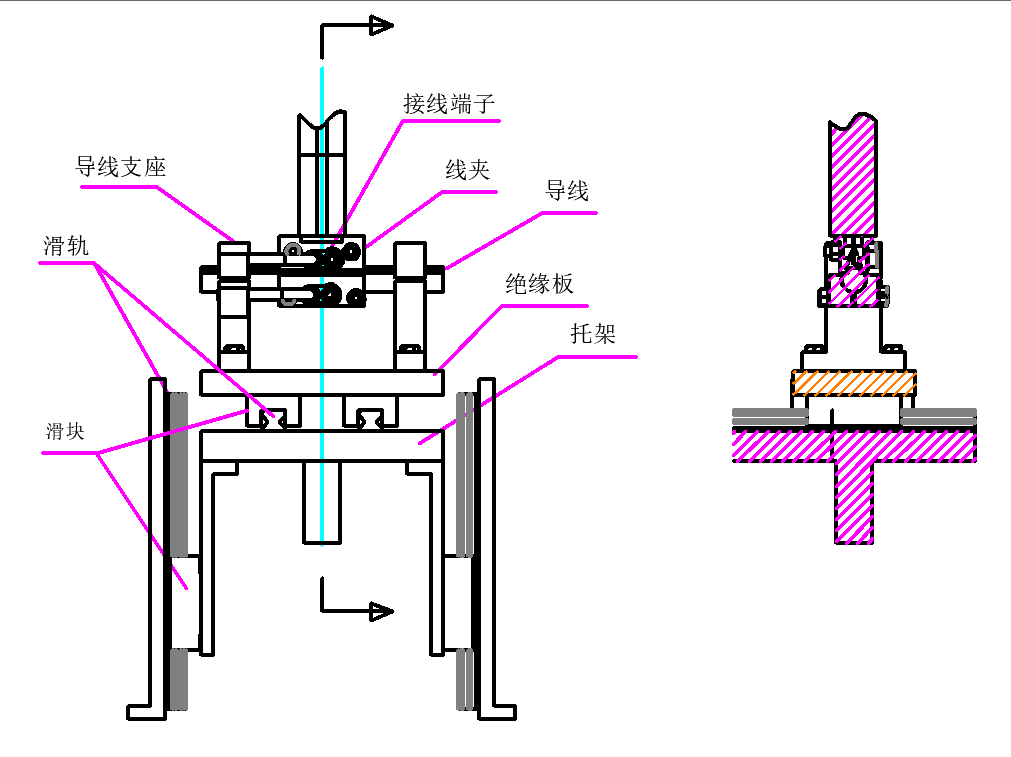
1.6 Penderia beban dipasang pada muka hujung rod omboh untuk mengukur beban ujian. Lapisan pengasingan dikhaskan pada sambungan.
(Nota: 1 penderia penggantungan dipasang pada bahagian atas enjin utama dan 2 klip wayar dipasang pada hujung rod omboh)
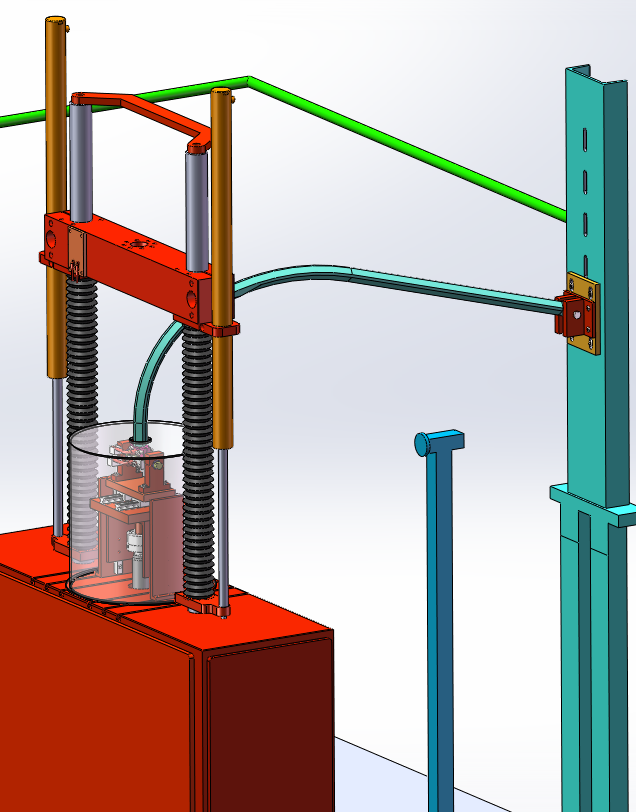
1.7 Untuk mengelakkan konduktor daripada jatuh atau bergetar longgar semasa ujian, keseluruhan mesin dilengkapi dengan pendakap penukaran wayar untuk mengelakkan situasi di atas. Semasa pemasangan di tapak, modul kuasa menyambung wayar utama ke pendakap pendawaian berhampiran peralatan melalui jambatan standard, dan pendakap dan sampel disambungkan dengan panjang wayar tertentu (wayar fleksibel tinggi).
Seperti yang ditunjukkan dalam rajah
1.8 Kebolehpercayaan dan Keselamatan:
1) Penebat pepejal: Pastikan rentetan ujian dihidupkan semasa getaran tanpa jatuh. Gunakan filem penebat untuk menutup logam terdedah komponen rasuk atas, komponen meja kerja dan platform hujung bawah (merah dalam gambar ialah filem). Gunakan perisai bulat untuk melindungi tiang pada kedua-dua sisi tanpa menjejaskan pengangkatan rasuk. Abah-abah pendawaian hendaklah diperbaiki, dan bahan penebat hendaklah digunakan di banyak tempat untuk mengambil langkah perlindungan penebat dengan bahagian peralatan lain;
 {6082097
{6082097
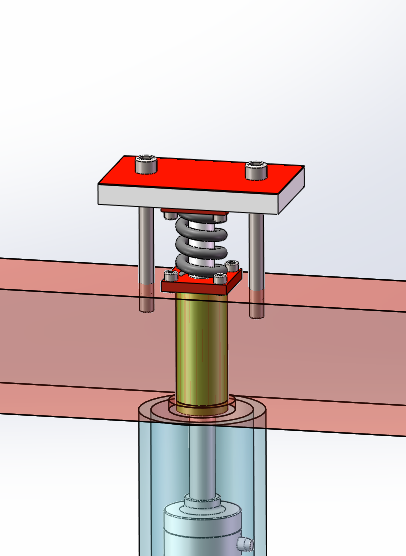
2) Rod tarik dipasang pada rasuk dengan bolt, dan lengan penebat digunakan di antara rod tarik dan rasuk, dan peranti spring diletakkan di tengah. Apabila mesin ujian berfungsi, daya pretensi perlu digunakan pada spring, dan saiz daya pretensi dikawal oleh bolt tetap (merah adalah bahan penebat yang dilindungi);
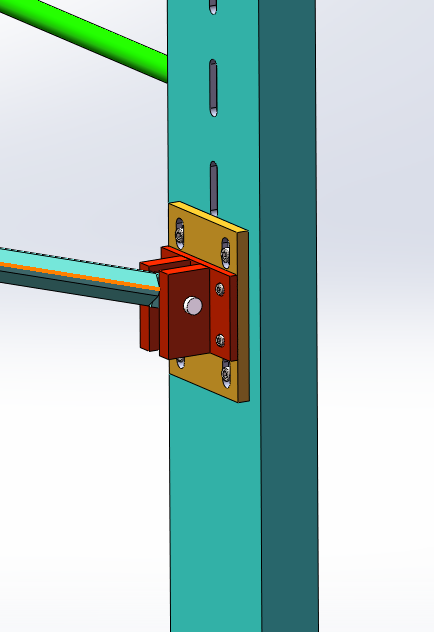
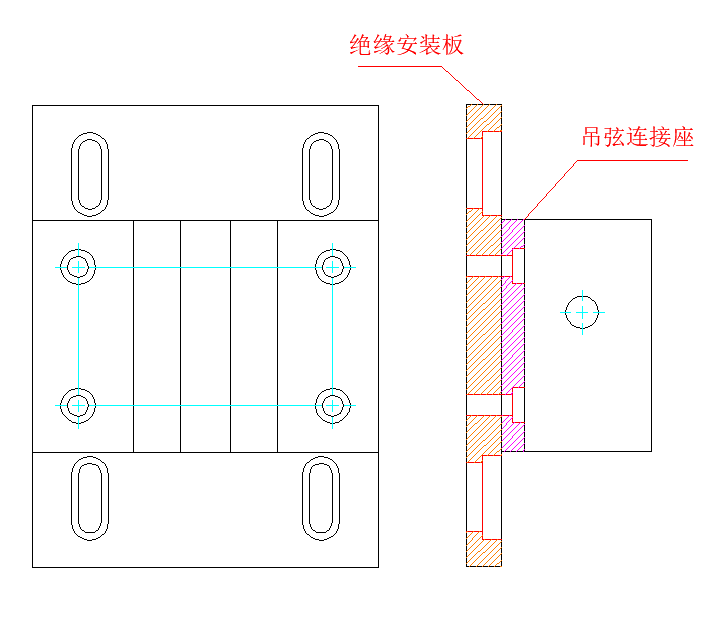
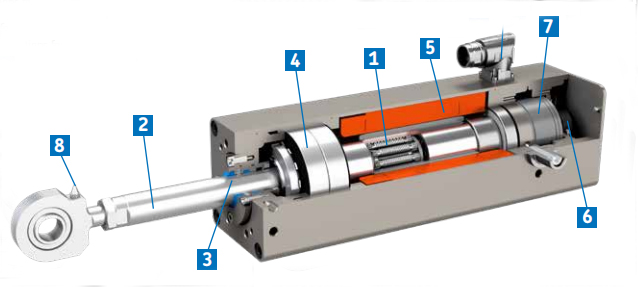
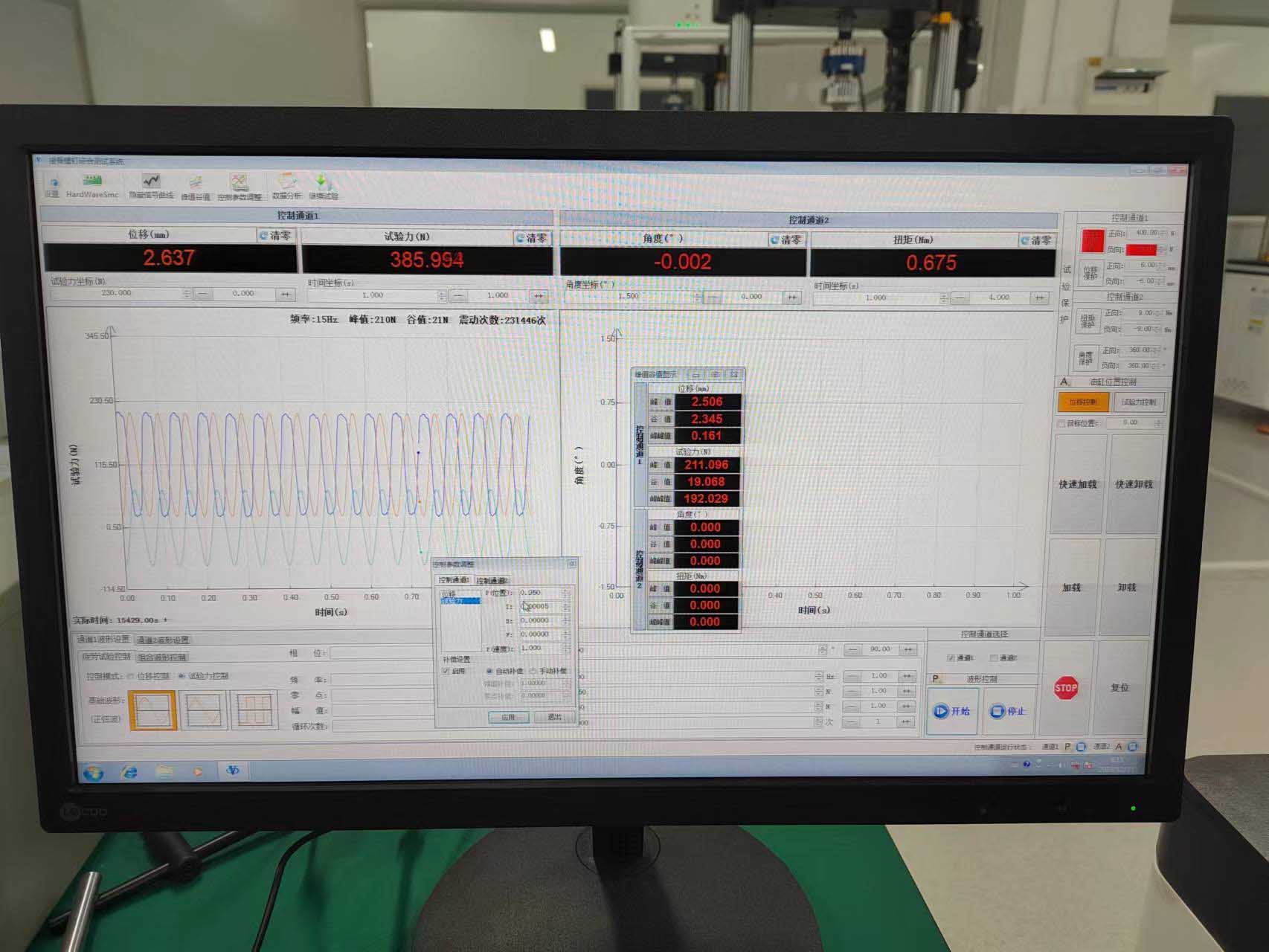
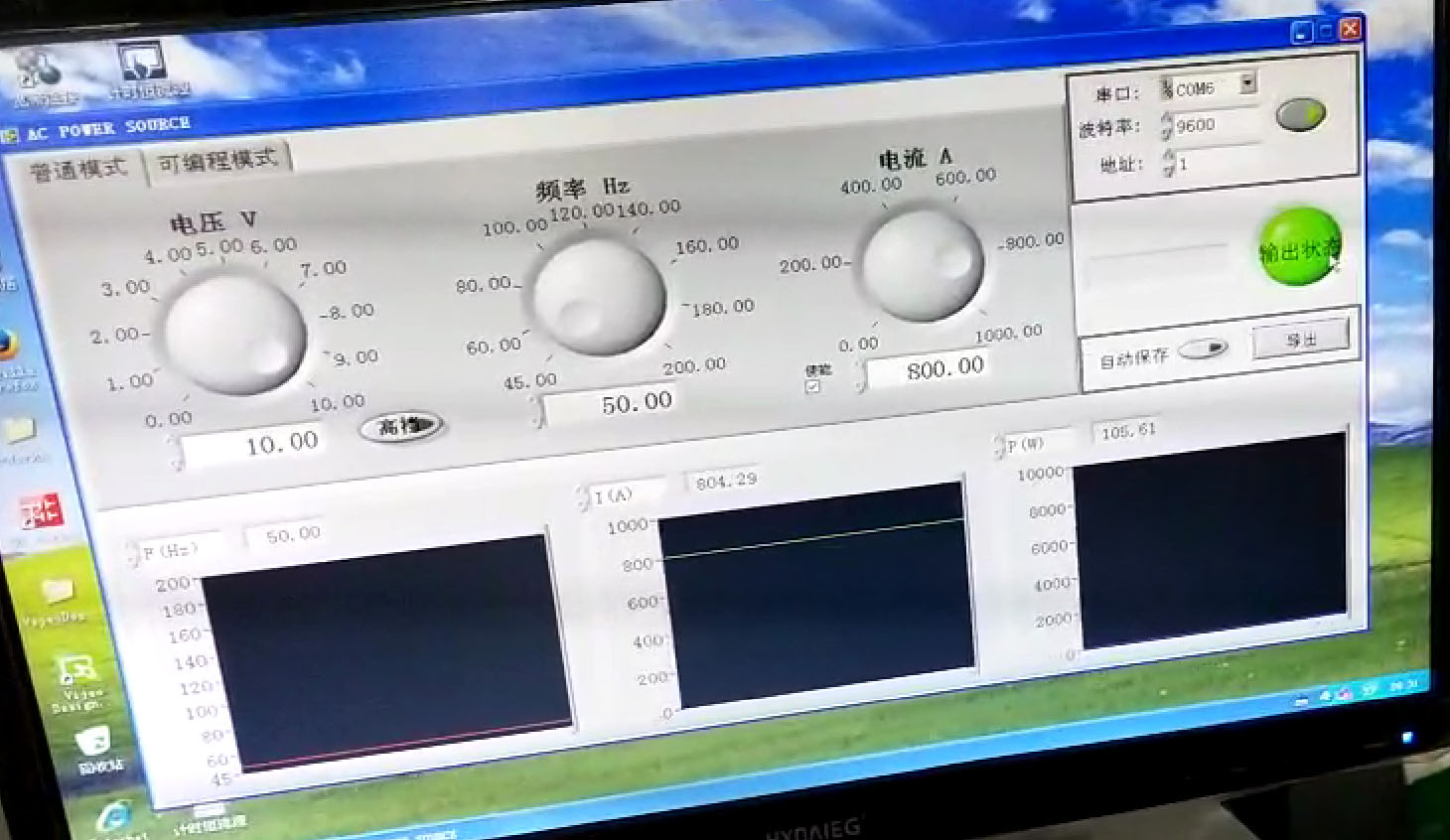
3) Kerusi penyambung tali gantung (ditutup dengan filem penebat) disambungkan dengan plat pelekap penebat, dan lubang pinggang plat pelekap penebat boleh melaraskan ketinggian tempat duduk penyambung tunduk gantung; 4) Kekonduksian: arus undian harus memenuhi arus keluaran penjana semasa, tanpa kehilangan arus yang banyak dan gangguan terhadap bentuk gelombang semasa; 5) Wayar penyambung peranti penjana semasa hendaklah tahan terhadap kakisan, pengoksidaan dan penebat luaran; 6) Bahagian sambungan mesin ujian keletihan dan peranti penjana semasa memerlukan kekuatan mekanikal yang tinggi dan pemasangan mudah; 7) Boleh menyesuaikan diri dengan julat panjang rentetan pemeriksaan (permukaan talian hubungan ke permukaan bawah kabel): 800~1600mm; 8) Penggerak, meja slaid, rasuk atas dan bawah, simpan berbilang lubang untuk memudahkan keperluan ujian keadaan kerja yang berbeza. (Penderia dan lekapan yang sepadan boleh ditukar ganti) 9) Peranti perlindungan bahan penebat diletakkan di antara perkakas pengapit wayar dan pendakap. Nota: 1. Apabila pendakap bergerak ke atas dan ke bawah, kedua-dua blok gelongsor sisi bergerak ke atas dan ke bawah di sepanjang rel gelongsor menegak dan kedua-dua rel gelongsor sisi tidak akan menjejaskan bahagian lain. 2. Apabila berfungsi, blok gelongsor di bawah papan penebat boleh bergerak pada rel gelongsor di atas plat sokongan 10) Dawai diapit dua kali oleh dua pengapit wayar atas dan bawah, wayar dan penyokongnya ditebat dengan gelang seramik, dan bahagian logam ditutup dengan filem penebat (merah dalam rajah ialah penebat filem). 11) Pengapit wayar dikunci dengan bolt, sambungan pengapit ditebat dan abah-abah wayar diikat pada kedudukan tetap pengapit wayar. 2. Penggerak: 2.1 Penggerak linear elektromagnet ialah komponen teras mesin ujian dan mengeluarkan kuasa melalui penggerak. Direka dan dihasilkan dengan teknologinya sendiri, ia terdiri daripada badan penggerak, modul kawalan elektromagnet dan penderia. Parameter asas Silinder penggerak diletakkan di bawah meja. Daya dinamik maksimum: ±1150N. Daya statik maksimum: ±1150N Lejang berkesan penggerak: +/-100mm(jumlah lejang 220mm); Lejang mampatan maksimum 110mm pada 2hz Apabila lejang mampatan maksimum ialah 20mm, kekerapan maksimum ialah 11hz, Tempoh percubaan tidak kurang daripada 500w kali. Actuator disertakan dengan sensor anjakan laser berketepatan tinggi SONY, Kedudukan had amplitud penggerak direka sebagai penimbal untuk mengelakkan kehabisan kawalan dan menyebabkan kerosakan; Sistem ini mengguna pakai peranti anti-tindak balas, nilai daya dipusatkan secara automatik, daya sisi dikurangkan, kesan ujian tegangan frekuensi tinggi dikurangkan, dan bentuk gelombang ujian dipertingkatkan. 2.2 Peranti penyingkiran kelegaan khas direka pada skru sambungan antara penderia beban dan chuck serta rod omboh dan chuck untuk meningkatkan lagi prestasi tindak balas dinamik. 3. Uji aksesori Lekapan seramik khas digunakan untuk ujian keletihan tali gantung. Bahagian utama seperti cakera tekanan dirawat dengan teknologi khas, yang mempunyai ciri kekerasan tinggi dan rintangan haus yang baik (tiada penebat). Peranti perlindungan penentududukan memastikan keselamatan rentetan gantung semasa ujian keletihan, memastikan tali gantung putus semasa ujian dan hujung yang patah tidak melompat, menghalang hujung yang patah daripada menghubungi mana-mana kedudukan peralatan, dan mengelakkan kejutan elektrik. 4. Peranti penjanaan semasa 1) Bekalan kuasa: AC 220V/AC 380V 50Hz; 2) Arus keluaran 0~1050A AC (gelombang sinus standard) /DC, arus keluaran terendah mencapai 300A, ralat ketepatan semasa ≤±0.5%; 3) Voltan keluaran 0-10VDC, ralat ketepatan ≤±0.5%; 4) Bentuk gelombang arus keluaran boleh laras, frekuensi pemuatan boleh laras, dan nilai RMS sebenar arus boleh laras secara berterusan; 5) Peranti hendaklah memastikan bahawa ia boleh terus berfungsi dalam proses ujian, dengan kawalan bebas kuasa hidup, masa mati kuasa, masa kawalan resolusi minimum 1ms; 6) Dengan paparan bentuk gelombang masa nyata, tetapan masa kuasa, tetapan masa mati kuasa, dan boleh mati kuasa bebas pada penghujung ujian (patah sampel) atau mempunyai langkah penebat pelindung yang lain; 7) Reka bentuk herotan bentuk gelombang semasa harus memenuhi piawaian kebangsaan dan piawaian industri yang sepadan; 8) Frekuensi AC output hendaklah sejajar dengan medan sebenar, 50Hz; 9) Peranti harus mempunyai fungsi lebihan arus dan lebihan voltan; 10) Boleh mengukur masa tindakan semasa rentetan gantung dan boleh merekodkan masa tindakan mengunci secara serentak; Bahagian perisian: 11) Lengkung arus dinamik, fungsi paparan lengkung arus purata (RMS), paparan nilai masa nyata semasa puncak maksimum dan minimum, rekod puncak semasa sejarah. Parameter terperinci: 5. Sistem kawalan: 5.1 Bilangan saluran kawalan: 2, termasuk tiga gelung kawalan gelung tertutup bagi daya ujian, anjakan ujian dan ubah bentuk ujian, dengan mod kawalan tanpa gangguan fungsi pensuisan lancar. Kekerapan muat semula data kawalan gelung tertutup maksimum ialah 1kHz; Resolusi pengawal A/D dan D/A ialah 16 bit. Julat kekerapan isyarat: 0.001Hz ~ 100Hz; Bentuk gelombang penjana isyarat: gelombang sinus, gelombang segi tiga, gelombang persegi, gelombang gigi gergaji, dll. Unit pemacu servo digunakan untuk memacu motor linear; Servo jauh membolehkan fungsi kawalan untuk kawalan jauh kuasa pemacu motor linear; Pengawal mempunyai fungsi penetapan parameter had dan fungsi perlindungan lengkap. Sebagai tambahan kepada perlindungan beban lampau (110%) dan perlindungan arus lampau sekunder, ia juga mempunyai perlindungan beban dinamik sewenang-wenangnya, perlindungan beban statik, perlindungan frekuensi dan sebagainya. 5.2 Perisian kawalan mesin (sistem) ujian dinamik: Perisian pengurusan sistem: Perisian adalah asas bagi keseluruhan pengawal servo digital, fungsi utamanya adalah untuk mengurus sumber perkakasan sistem kawalan, menentukan penderia, laraskan parameter kawalan digital, tetapkan perlindungan, paparkan mod kawalan semasa, dan status penjana fungsi dan penentukuran sensor. Osiloskop digital jejak dwi, ammeter servo digital dan 6 voltmeter digital disediakan untuk paparan masa nyata data ujian. Perisian penjana fungsi: Perisian ini digunakan terutamanya untuk ujian dinamik amplitud malar, seperti ujian keletihan amplitud malar. Perisian penjana fungsi secara automatik akan menjejak dan membetulkan nilai puncak dan lembah kuantiti kawalan (seperti beban) untuk memastikan bahawa nilai ralat dinamik biasa bagi setiap puncak ialah ±0.5%FS semasa keseluruhan proses ujian. Semasa ujian, pengendali boleh menukar puncak, lembah dan kekerapan secara dinamik, dan juga boleh melakukan pegangan isyarat manual atau automatik. Jika selang kitaran penahanan isyarat automatik ditetapkan, Setiap kali bilangan kitaran ujian ditambah dengan selang satu kitaran, perisian akan secara automatik mengekalkan isyarat pada tahap yang ditetapkan untuk memudahkan pengukuran beberapa data ujian (seperti panjang retak visual) . Bentuk gelombang pilihan perisian adalah gelombang sinus, gelombang segitiga, gelombang persegi, gelombang serong, gelombang gigi gergaji, gelombang gabungan, ujian gelombang serong gabungan. Pada akhir ujian, perisian akan menyimpan beberapa data penting, seperti beban ujian, kekerapan, bilangan kitaran dan masa ujian. Perisian ini juga boleh melakukan ujian statik mudah. Perisian ujian pelbagai fungsi: Perisian ini adalah perisian ujian yang fleksibel dan berfungsi sepenuhnya, pengguna boleh menggunakannya untuk mereka bentuk kaedah ujian khas, tetapi tidak memerlukan pengaturcaraan. Perisian ini mempunyai pelbagai fungsi kawalan, fungsi pemerolehan data dan fungsi tambahan lain pengawal servo dilakukan pada panel dalam bentuk ICONS, pengguna boleh menyeret dan melepaskan ICONS fungsi ini ke dalam panel definisi ujian dengan tetikus, dan menggabungkan mereka mengikut keperluan pengguna sesuka hati, anda boleh menguji mengikut kaedah ujian yang ditentukan pengguna. Perisian penjana fungsi: Perisian ini digunakan terutamanya untuk ujian dinamik amplitud malar, seperti ujian kelesuan amplitud malar, ujian pertumbuhan retak keletihan amplitud malar, dll. Perisian penjana fungsi akan menjejak dan membetulkan puncak dan lembah secara automatik nilai kuantiti kawalan (seperti beban) untuk memastikan bahawa nilai ralat dinamik biasa bagi setiap puncak ialah ±0.5%FS semasa keseluruhan proses ujian. Semasa ujian, pengendali boleh menukar puncak, lembah dan kekerapan secara dinamik, dan juga boleh melakukan pegangan isyarat manual atau automatik. Jika selang kitaran penahanan isyarat automatik ditetapkan, Setiap kali bilangan kitaran ujian ditambah dengan selang satu kitaran, perisian akan secara automatik mengekalkan isyarat pada tahap yang ditetapkan untuk memudahkan pengukuran beberapa data ujian (seperti panjang retak visual) . Bentuk gelombang pilihan perisian adalah gelombang sinus, gelombang segitiga dan gelombang persegi. Selepas ujian, perisian akan menyimpan beberapa data penting, seperti beban ujian, kekerapan, bilangan kitaran dan masa ujian. Perisian ini juga boleh melakukan ujian statik mudah. Perisian ujian pelbagai fungsi: Perisian ini adalah perisian ujian yang fleksibel dan berfungsi sepenuhnya, pengguna boleh menggunakannya untuk mereka bentuk kaedah ujian khas, tetapi tidak memerlukan pengaturcaraan. Perisian ini mempunyai pelbagai fungsi kawalan, fungsi pemerolehan data dan fungsi tambahan lain pengawal servo dilakukan pada panel dalam bentuk ICONS, pengguna boleh menyeret dan melepaskan ICONS fungsi ini ke dalam panel definisi ujian dengan tetikus, dan menggabungkan mereka mengikut keperluan pengguna sesuka hati, anda boleh menguji mengikut kaedah ujian yang ditentukan pengguna. 5.3. Parameter teknikal pengawal: 5.3.1 Unit penyaman isyarat universal semua digital: daya ujian, gelung kawalan gelung tertutup anjakan. 5.3.2 Kekerapan muat semula data kawalan gelung tertutup maksimum ialah 10kHz. 5.3.3 Peleraian A/D Pengawal ialah 18 bit dan resolusi D/A ialah 16 bit. 5.3.4 Julat frekuensi isyarat: 0.01Hz ~ 100Hz. 5.3.5 Bentuk gelombang penjana isyarat: gelombang sinus, gelombang segitiga, gelombang persegi, gelombang program. 5.3.6 Boleh merealisasikan kawalan anjakan separuh tempoh kawalan daya separuh tempoh atau bentuk gelombang tersuai pelanggan untuk melengkapkan ujian lain bagi spesimen 5.3.7 Ketepatan kawalan: ketepatan kawalan statik ialah 0.3% FS dan ketepatan kawalan dinamik biasa ialah 0.5% FS. 5.3.8 Fungsi kawalan mula dan henti servo jauh. 5.3.9 Kapasiti kaunter: Masa tanpa had. 5.3.10 Unit input dan output I/O lain yang diperlukan: empat input analog, empat antara muka output analog; Empat input digital dan empat antara muka output digital (pilihan). 6. Konfigurasi lain dan aksesori yang diperlukan: Bingkai tindak balas untuk menentukur penderia beban; Konfigurasikan aksesori mampatan; Dengan perisai keselamatan, Lekapan pemadanan dan alatan untuk ujian penggantungan dan pengapit wayar 7. Penunjuk prestasi teknikal utama: 1. Daya ujian statik maksimum: ±1150N, ketepatan paparan statik:, ketepatan paparan daripada 5% setiap fail ±0.5%; 2. Daya ujian dinamik maksimum: ±1150N; Kemeruapan dinamik: tidak lebih daripada ±0.5%FS. 3. Amplitud maksimum penggerak: ±100mm, menunjukkan ketepatan: ±0.5%FS. 4. Julat operasi: 0-20Hz. 5. Mod kawalan: kawalan beban, kawalan anjakan; 6. Bentuk gelombang ujian utama: gelombang sinus, gelombang persegi, gelombang segi tiga, gelombang serong dan bentuk gelombang input luaran; 7. Kuasa mesin tunggal :11kw 8. Kuasa sumber arus tunggal: 10kw 9. Dimensi keseluruhan 750*700*2700 dan 750*700*2250 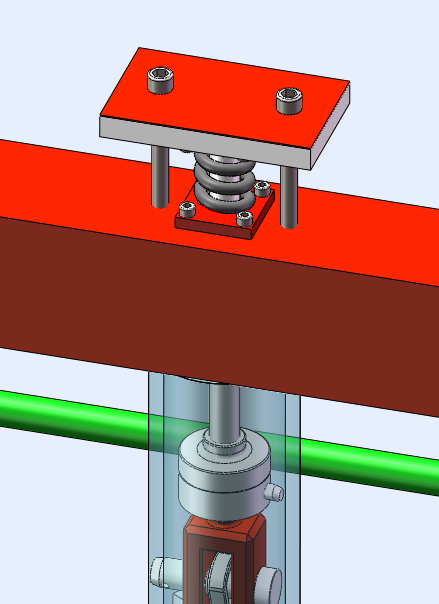
 {490}91081
{490}91081
 {6082097
{6082097
 {490}91081
{490}91081


Kaedah pengeluaran
SPWM
INPUT
Fasa
3φ4W
Voltan
380V±10%
Kekerapan
47HZ-63HZ
OUTPUT
Fasa
1φ2W
Voltan Sumber arus malar
10V(Voltan pembukaan)
Arus Menunjukkan Sumber Arus Malar
0~1000A Boleh Laras
Kekerapan
45HZ~200HZ
Pendawaian
Pengekstrakan jalur kuprum
Perlindungan
Litar elektronik dengan cepat mengenal pasti lebih arus, lebih voltan, lebih suhu secara automatik dimatikan, keadaan bukan ujian VA=0
Paparan LED
Vms Voltan, Senjata semasa, Frekuensi Fre, Watt kuasa, PF faktor kuasa
Nisbah pelarasan kuasa
0.1%
Kadar pelarasan beban
0.5%FS
Kadar herotan bentuk gelombang
3%(beban perintang tulen)
Peraturan Kekerapan
0.01%
Peleraian voltan
0.1V
Peleraian semasa
0.1(A)
Resolusi Kekerapan
0.1HZ
Ketepatan Pengukuran
Voltan
0.5%FS+5dgt
Semasa
0.5%FS+5dgt
Watt
0.5%FS+5dgt
Kekerapan
0.01%FS+5dgt
Tetapkan ketepatan
Semasa
0.5%FS
Kekerapan
0.3%FS
Perlindungan
Lebih Semasa; Lebih Suhu; Lebih Beban
Persekitaran
Suhu:0℃-45℃; Kelembapan relatif: 0-90% (keadaan tidak pemeluwapan); Ketinggian:1500m
Reaktans penebat
500Vdc 20MQ atau lebih tinggi
Penebat voltan
1800Vac/5mA/1min
Mod penyejukan
Paksa penyejukan kipas
W*H*D(mm)
W:550 H:700 tanpa kastor D700
Kecekapan
≥98%
Bunyi bising
≤60DB(1m)
Tahap perlindungan
IPX20
 {6082097
{6082097













