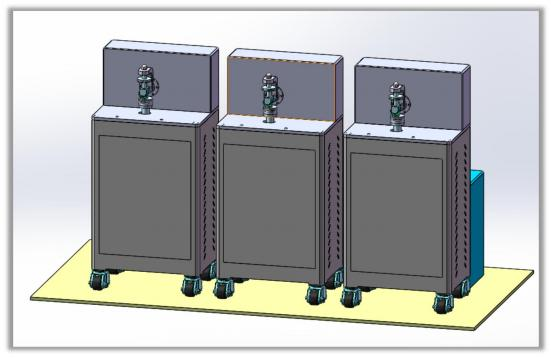
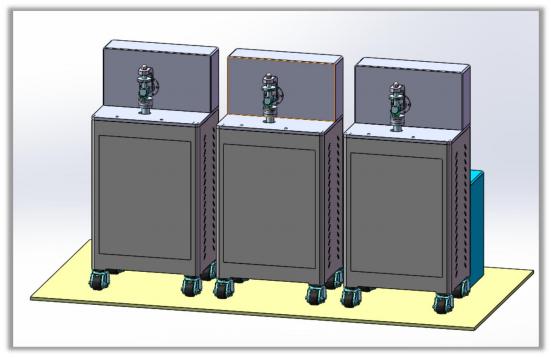
HH3 penguji haus sendi lutut terdiri daripada tiga bahagian: hos ujian, lekapan dan bahagian kawalan elektronik. Ia boleh mensimulasikan kehausan, keletihan dan pengelupasan implan lutut dan proses kerosakan lain, dan boleh menguji 3 sendi lutut pada masa yang sama Implan.

1 .1 Ciri
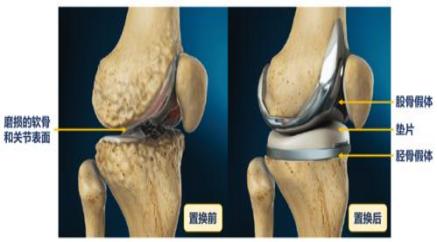
Penguji haus sendi lutut HH3 terdiri daripada tiga bahagian: hos ujian, lekapan dan bahagian kawalan elektronik. Ia boleh mensimulasikan kehausan, keletihan dan pengelupasan implan lutut dan proses kerosakan lain, dan boleh menguji 3 sendi lutut pada masa yang sama Implan. Mesin ujian ini secara automatik mengawal daya ujian, masa dan kelajuan ujian, dan mengukur daya ujian dan tork dalam masa nyata. Ia boleh digunakan untuk pembuatan, penggunaan dan penyelidikan prostesis sendi lutut dan bidang perubatan lain yang berkaitan.
Pemacu gelendong mengguna pakai motor servo AC dan sistem kawalan yang diimport, yang boleh merealisasikan peraturan kelajuan tanpa langkah dan yang diperlukan Kira tork malar/keluaran daya paksi malar dalam julat kelajuan; daya ujian digunakan menggunakan sistem pemuatan spring skru. Daya ujian digunakan dengan mantap dan boleh dipercayai, dan daya ujian boleh ditetapkan oleh pengendali pada antara muka komputer; kelajuan gelendong, Parameter seperti bilangan pusingan, daya ujian, dan masa ujian semuanya dikawal oleh komputer, yang boleh mengumpul data ujian dalam masa nyata dan merancangnya. Keluk ujian yang sepadan boleh dibuat, dan data ujian atau keluk boleh disimpan, diambil dan dicetak sesuka hati.
Sistem pemuatan pacuan motor servo tiga hala dengan komponen berbeza untuk AP sambungan lengkap, putaran, lenturan Penculikan dan pergerakan lain, modul sensor daya empat komponen menguji daya paksi tork, tujahan mendatar dan lentur masing-masing Tork semasa sambungan , pemasangan servo tiga hala yang dilengkapi dengan pengekod berputar berketepatan tinggi, pengukuran sudut masa nyata, dan anjakan dan menyediakan sumber data yang berkesan untuk kawalan komputer hos.
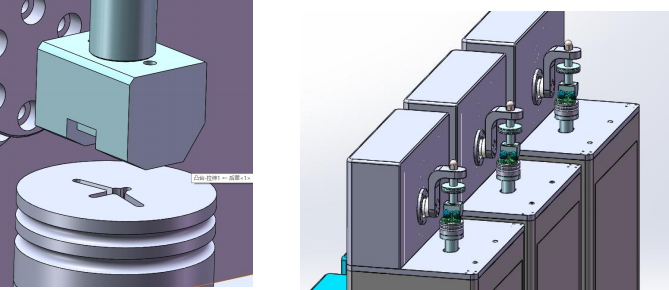
Setiap mekanisme gerakan dikawal dan diselaraskan secara bebas, dengan tiga stesen dan 15 paksi untuk menyelesaikan ujian kerosakan komponen sendi pengisaran.
1.2 Spesifikasi Utama
1. Perisian pengendalian instrumen dengan antara muka operasi bahasa Cina.
2. Instrumen yang menjalankan perisian sedia untuk digunakan, tiada perisian khas diperlukan.
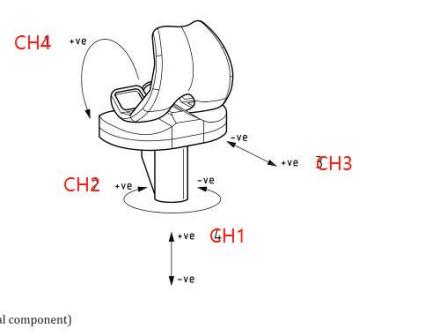
3. Darjah kebebasan: Setiap stesen ujian boleh merealisasikan lenturan / lanjutan, putaran dalaman / putaran luaran, pergerakan ke hadapan / ke belakang , kawalan gerakan tiga dimensi dan beban daya paksi, dan setiap darjah kebebasan boleh terkawal. Kedua-dua sensor dan daya dikesan; pergerakan bebas ke arah dalam / keluar dan arah dalam / keluar adalah mungkin.
4. Ketaklinieran penderia tidak melebihi 0.10% daripada skala penuh dan histerisis tidak melebihi 0. 10%, kebolehulangan tidak melebihi 0.05% daripada skala penuh.
5. Julat sensor anjakan dan anjakan: anjakan paksi 100mm, lenturan/sambungan 120, putaran dalaman/Putaran luar 20, anjakan anterior / posterior 15mm, anjakan medial / sisi 5mm, dalam.
6. Kapasiti beban dan julat sensor daya: beban paksi 3KN , tork dalaman / luaran 20Nm , Beban ke hadapan / ke belakang 1KN .
7. Ketepatan kawalan daya dan anjakan: Ralat daya dan amplitud anjakan dalam satu kitaran tidak boleh melebihi maksimum yang ditetapkan Ralat fasa maksimum tidak boleh melebihi 3% daripada kitaran penuh. Instrumen ini diuji mengikut ISO 14243-1 dan ISO 14243-3 dalam setiap tahap kebebasan yang boleh dikawal. Lengkung yang diukur dan nilai sisihan bagi penderia daya dan anjakan .
8. Ia mempunyai fungsi input analog lapan saluran dan boleh disegerakkan dengan data luaran.
9. Kekerapan ujian: 1Hz , ketepatan 0.1Hz.
10. Sistem kawalan: Ia harus dilengkapi dengan pengawal servo berbilang stesen, berbilang saluran yang berasingan untuk mencapai kawalan automatik gelung tertutup bagi daya dan anjakan.
11. Pengawal seharusnya dapat melakukan pampasan kawalan nilai puncak ke lembah untuk memastikan nilai puncak yang diperlukan oleh isyarat boleh dicapai dengan tepat apabila bentuk gelombang kitaran digunakan sebagai arahan kawalan.
12. Ia sepatutnya dapat melaksanakan ujian pengaturcaraan keluk gaya berjalan tersuai; dapat melaksanakan kawalan manual langkah demi langkah bagi setiap tahap kebebasan yang boleh dikawal; dan boleh mengeksport data mentah dalam format Excel.
13. Semasa ujian, perisian harus dapat mencerminkan daya dan lengkung anjakan setiap stesen dalam masa nyata dan sistem kawalan. Sistem seharusnya boleh melaraskan lengkung gerakan sampel secara automatik untuk dipadankan dengan lengkung sasaran tanpa campur tangan manual.
14. Kadar kawalan gelung tertutup masa nyata ≤ 6kHz , kecuali untuk mod kawalan daya dan anjakan, pengawal seharusnya dapat Melaksanakan mod kawalan pembolehubah yang dikira.
15. Kekerapan pensampelan digital tidak boleh kurang daripada 100 kHz , dan kaedah pensampelan hendaklah termasuk: nilai puncak, nilai lembah, masa masa, maksimum, minimum, purata , kitaran / logaritma, dsb.
16. Ia mempunyai mod dwi, mod kerja arahan saluran maklum balas saluran.
17. Ia mempunyai fungsi menyemak sendiri pengujaan sensor yang hilang .
18. Suhu: Suhu sederhana pelincir boleh dikekalkan pada (37 ℃) dan terdapat sistem kawalan suhu.
19. Medium pelincir : Permukaan sendi boleh direndam dalam medium pelincir, dan medium pelincir hendaklah dimeterai tanpa kebocoran; dan dilengkapi dengan peranti pemantauan kebocoran.
20. Komponen ujian: dilengkapi dengan alatan yang diperlukan untuk menguji, memuatkan stesen kerja dan memuatkan untuk semua pergerakan Stesen kerja rendaman menyediakan sampel standard rujukan untuk penentukuran peralatan dan penyelesaian masalah.
21. Butang berhenti kecemasan: Peralatan hendaklah dilengkapi dengan butang berhenti kecemasan.
22. Perlindungan keselamatan: Peralatan hendaklah dilengkapi dengan penutup pelindung bahan polikarbonat termoplastik yang jelas dan lutsinar; Terdapat peranti interlock keselamatan. Apabila pintu penutup pelindung dibuka, peralatan seharusnya dapat menghentikan ujian secara automatik.
1.3 Keadaan kerja
Pada suhu bilik Dalam julat 10 ℃~ 35 ℃;
Kelembapan relatif tidak melebihi 80%;
Pemasangan yang betul pada asas yang kukuh;
Dalam persekitaran yang bersih tanpa getaran, media menghakis dan gangguan medan elektromagnet yang kuat;
Julat turun naik voltan bekalan kuasa tidak boleh melebihi voltan terkadar  10% .
10% .
2. Komposisi struktur
Mesin ujian dibahagikan kepada tiga stesen kerja, iaitu sistem pemacu gelendong, sistem pemuatan sampel dan daya paksi Ketiga-tiga stesen kerja berkongsi pemacu gelendong yang sama. Sistem dinamik dan sistem kawalan perisian.
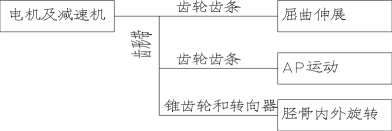
2.1 Sistem pemacu gelendong
Motor paksi menggunakan sistem kawalan kelajuan bersepadu servo AC Panasonic dan motor. Kuasa motor maksimum ialah 7.5 Kw, kuasanya dibahagikan kepada 3 baris keluaran.
Yang pertama: Selepas rak gear, klac elektromagnet dan penderia tork, ia menjadi bandul berputar femur Klac elektromagnet bertanggungjawab mengawal kuasa hidup dan mati, dan penderia tork bertanggungjawab untuk mengukur tork. Ukur tork semasa operasi.
Yang kedua: selepas melepasi tali pinggang bergigi dan rak gear , ia menjadi terjemahan salingan kiri dan kanan, memacu pergerakan AP sampel .
Yang ketiga: melalui tali pinggang bergigi , gear serong dan gear stereng, ia ditukar kepada ayunan putaran tibia, mendorong sampel berputar ke dalam dan ke luar.
Laluan penghantaran ditunjukkan dalam rajah di bawah.
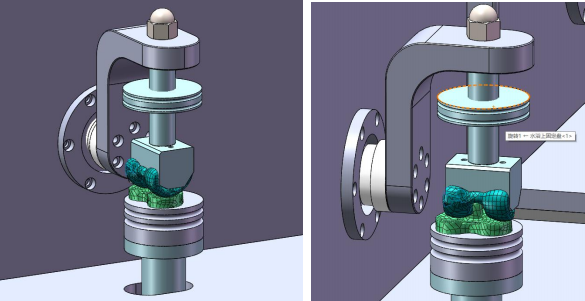
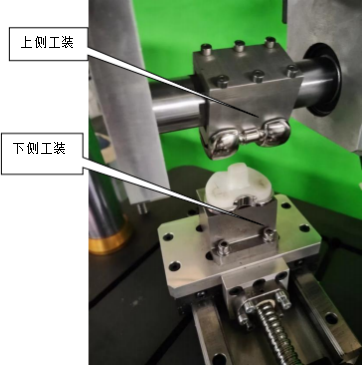
2.2 Sistem pemuatan sampel
Sistem pemuatan spesimen mensimulasikan kebebasan bergerak di bawah keadaan manusia untuk komponen implan sendi lutut Ia dipasang dan diperbaiki. Ia terdiri daripada tempat duduk pelekap, tempat duduk gelongsor, tempat duduk nilon, penggelek, lengan gelongsor, dsb.
Pelaksanaan khusus adalah seperti berikut:
Pemasangan perkakas haus sendi lutut agak rumit. Sila pasangkannya dengan ketat mengikut rajah. Di samping itu, saluran yang sepadan dilampirkan.
Sila gunakan nombor wayar yang sepadan semasa menyambungkan wayar.
(Struktur yang ditunjukkan dalam rajah hanya digunakan untuk menunjukkan prinsip pergerakan, objek sebenar akan diutamakan)

( Struktur yang ditunjukkan dalam rajah hanya digunakan untuk menunjukkan prinsip pergerakan, objek sebenar akan diutamakan)
Anda perlu memproses semula alatan atas dan bawah mengikut sampel untuk memenuhi keperluan ujian. (Setiap saiz produk Butiran berbeza-beza)

6. Pemilihan saluran dan pelarasan berkaitan
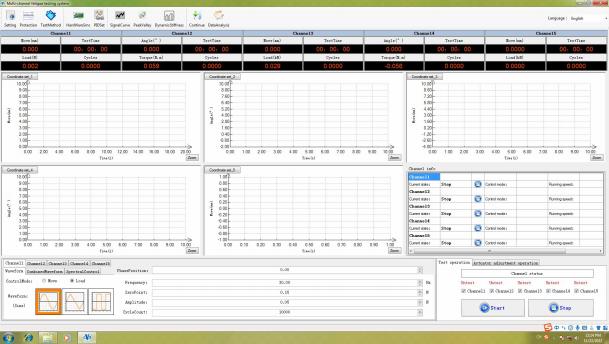
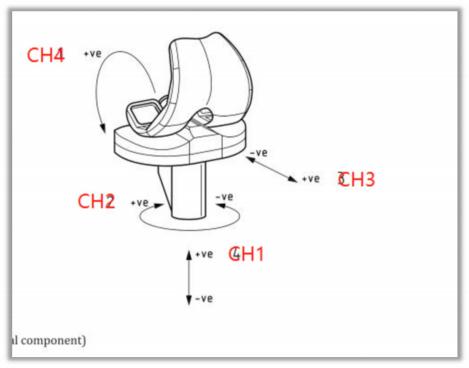
Digabungkan dengan gambar di atas, semak saluran mana yang berfungsi dengan menyemak saluran. Apabila melaksanakan ISO 14243.3 , pilih 1-4 lorong , Saluran 5 ialah saluran pengembangan untuk naik taraf seterusnya. Untuk percubaan paksi tunggal atau paksi dwi lain, sila pilih saluran yang sepadan.
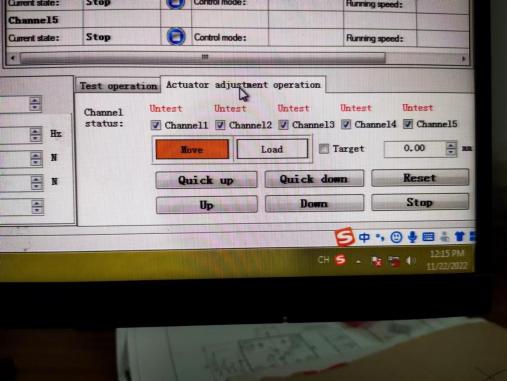
Cepat naik/naik = cepat memuat/memuat
Cepat turun/turun = Cepat turun/turun
7. Sepadan dengan ISO 14243.3 , adalah perlu untuk mengimport bentuk gelombang kawalan, seperti yang ditunjukkan dalam rajah:
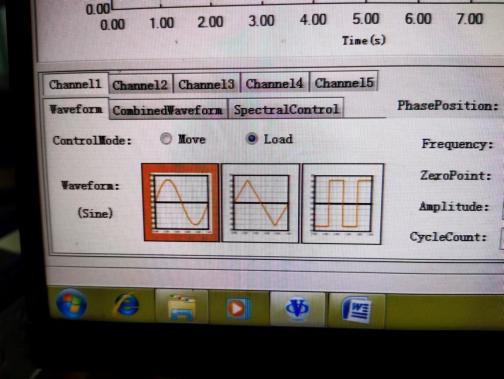
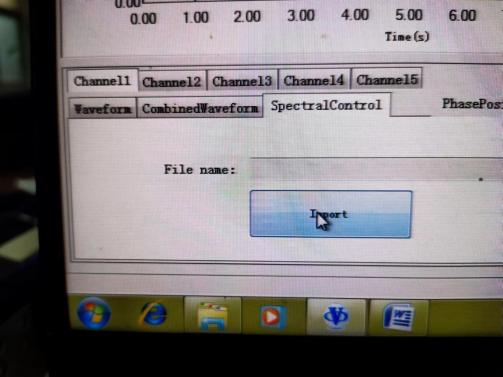
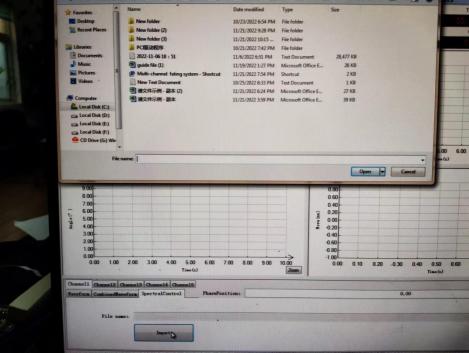
Pilih bentuk gelombang pratetap kilang. Jika anda perlu menetapkan bentuk gelombang atau tindakan baharu, anda boleh melakukannya dalam fail ini. Ubah suai dan simpan di bawah nama lain.
Untuk pelarasan terperinci bagi setiap saluran, sila rujuk manual perisian saluran tunggal.
8. Perihal perlindungan:
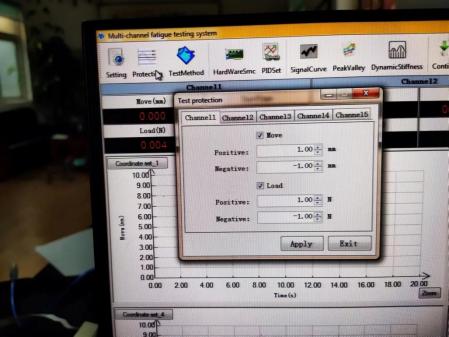
percubaan tidak bergerak atau tidak boleh dijalankan selepas mengklik Mula, semak sama ada terdapat sebarang parameter yang ditetapkan di luar toleransi dalam pilihan perlindungan.
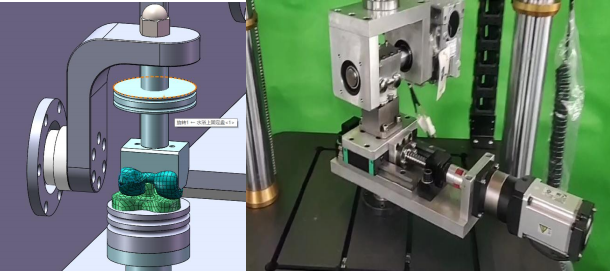
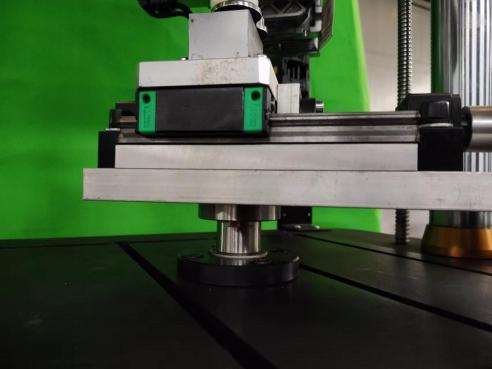
2.3 Sistem pemuatan daya paksi
Mesin ini menggunakan struktur pemuatan spring. Mekanisme pemuatan didorong oleh motor stepper, yang dihantar melalui tali pinggang bergigi arka bulat, takal segerak dan pasangan skru bola ketepatan, dan dipandu oleh rel panduan gerakan linear ketepatan untuk memacu tempat duduk aplikasi daya. Tempat duduk penggunaan daya dibetulkan dengan mekanisme pegas, yang menggunakan daya pada pelantar gelongsor selepas spring dimampatkan. Daya ujian antara permukaan geseran spesimen penggelek terbentuk. Dengan mengawal motor untuk memacu kerusi daya untuk bergerak ke hadapan dan ke belakang di ruang angkasa, Iaitu, aplikasi dan magnitud daya ujian boleh dikawal. Penderia beban dipasang pada satah tempat duduk aplikasi daya. Kumpul isyarat daya. Panduan galas gerakan linear memastikan penggunaan dan kestabilan daya ujian. Bahagian pemuatan spring Mudah untuk memuat dan memunggah.
Apabila daya ujian mula dimuatkan, penderia akan memasukkan tekanan pratetap ke dalam sistem kawalan mikrokomputer dan tekanan pratetap Mikrokomputer kemudian mengawal motor untuk berundur sehingga tekanan sistem seimbang dengan tekanan pratetap.
2.4 Muatkan Sistem Rendam
kotak cecair rendaman, pemanas, penderia suhu, pam peristaltik, tiub silikon, dsb.
Pelanggan boleh memproses lubang penentududukan pada permukaan hujung silinder mengikut saiz sebenar sampel dan sudut pengapit boleh laras. Selepas melaraskan sudut, kunci peluncur kedudukan kiri .
2.5 Sistem kawalan perisian Sistem kawalan dipasang pada mesin kawalan dan disambungkan kepada hos ujian melalui kabel komunikasi. Persekitaran pengendalian perisian ialah WINDOWS XP. Perisian kawalan ialah antara muka operasi interaktif grafik, yang bertanggungjawab untuk menghantar arahan untuk mengawal sistem mula dan berhenti, kelajuan operasi, daya pemuatan, suhu cecair rendaman, dan mengumpul data operasi sistem seperti daya paksi, tork, suhu, masa ujian , dsb. semasa ujian. Selepas pengiraan dan pemprosesan, keluk masa daya ujian, masa tork dan data lain dikeluarkan dalam bentuk carta. Digabungkan dengan gambar di atas, semak saluran untuk mengesahkan saluran yang berfungsi. Apabila melaksanakan ISO 14243.3, pilih 1-4 saluran, 5 t saluran adalah saluran pengembangan untuk peningkatan seterusnya. Untuk percubaan paksi tunggal atau paksi dwi lain, sila pilih saluran yang sepadan. Naik/naik cepat = muat/muat pantas Cepat turun/turun = cepat nyahpasang/nyahpasang 7. Sepadan dengan ISO 14243.3 , adalah perlu untuk mengimport bentuk gelombang kawalan, seperti yang ditunjukkan dalam rajah: Pilih bentuk gelombang pra-buat kilang. Jika anda perlu menetapkan bentuk gelombang atau tindakan baharu, anda boleh mengubah suainya dalam fail ini. Simpan di bawah nama lain. Untuk pelarasan terperinci bagi setiap saluran, sila rujuk manual perisian saluran tunggal . 8. Perihal perlindungan: percubaan tidak bergerak atau tidak boleh dijalankan selepas mengklik Mula, semak sama ada terdapat sebarang parameter yang ditetapkan di luar toleransi dalam pilihan perlindungan. 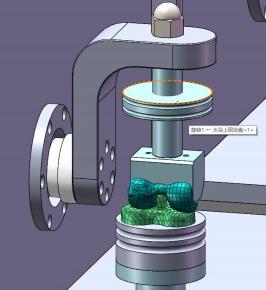
 {490982} {49098}
{490982} {49098}

 {49091}
{49091}