

SG30A penunjuk penyerap hentak dikawal mikrokomputer keletihan bangku ujian komprehensif digunakan terutamanya untuk semua jenis kereta, penyerap hentak beg udara suspensi udara, kenderaan diubah suai, SUV, kenderaan berperisai, trak ringan, trak berat, ATV dan semua jenis kenderaan bermotor yang digunakan dalam ujian penunjuk penyerap getaran, ujian kelajuan talian, ujian hayat keletihan.
1. Gambaran Keseluruhan Produk:
SG30A penunjuk penyerap hentak dikawal mikrokomputer keletihan bangku ujian komprehensif digunakan terutamanya untuk semua jenis kereta, penyerap hentak beg udara suspensi udara, kenderaan diubah suai, SUV, kenderaan berperisai, trak ringan, trak berat, ATV dan semua jenis kenderaan bermotor yang digunakan dalam ujian penunjuk penyerap getaran, ujian kelajuan talian, ujian hayat keletihan. Lekapan khas juga boleh dibuat untuk menyesuaikan diri dengan ujian keletihan spesimen khas.
2. Gambar produk:

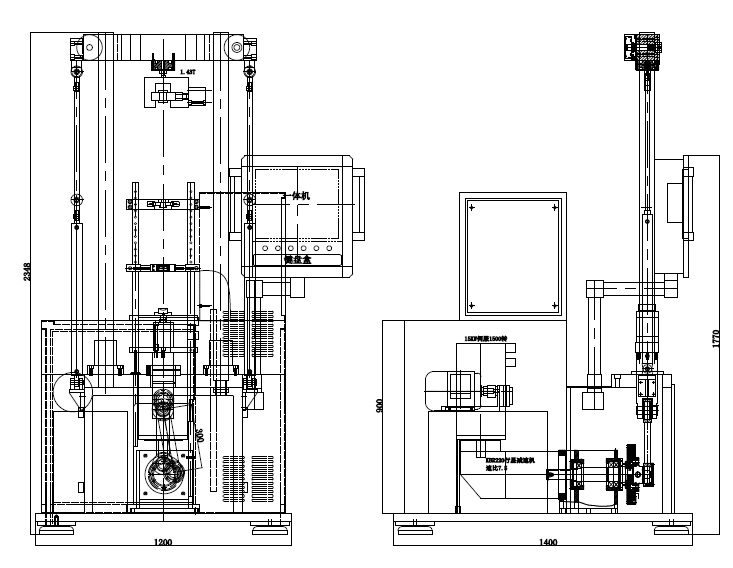
(Rajah 1)
(Rajah 2)
3. Penerangan tentang struktur peralatan
Mesin ini adalah operasi stesen tunggal, keseluruhannya ialah struktur lajur berkembar menegak, mengikut rangka, rasuk atas dan mekanisme pengangkat, sistem pengesanan daya redaman s , mekanisme pemacu, kejutan mekanisme menekan silinder penyerap, peralatan penunjuk dan keletihan, sistem hidraulik, kad pemerolehan, komputer, perisian kawalan industri dan sistem kawalan elektronik, sambungan palam cepat pilihan.
1. Rangka: Penggunaan keluli saluran gred industri dan mesin kimpalan plat keluli dan mengembangkan bingkai persegi, kimpalan manik seragam dan cantik. Dengan kekuatan dan ketegaran yang mencukupi, untuk memastikan operasi yang selamat.
2. Rasuk atas dan mekanisme pengangkat: terdiri daripada rasuk, dua lajur panduan rasuk, dua silinder hidraulik angkat, mekanisme mengunci rasuk, tekanan hidraulik, dsb. Silinder hidraulik memacu rasuk silang ke atas dan ke bawah dan dikunci secara hidraulik ia secara automatik dalam kedudukan berhenti, dengan itu mengawal ketinggian pemasangan peralatan dan menjadikan lejang ujian terletak di bahagian tengah lejang penyerap hentakan.
3. Mekanisme pengetatan dan penarikan atas rod omboh: terdiri daripada silinder hidraulik, mekanisme pemandu dan penyambung, penderia daya dan lekapan, dsb., untuk mencapai pengapit rod omboh kembali ke kedudukan kerja.
4. Sistem pengesanan daya redaman: terdiri daripada penderia daya dan peranti pengapit manual. Penderia daya digunakan untuk pemantauan masa nyata daya tegangan dan mampatan semasa pergerakan bahan kerja.
5. Mekanisme pemacu: terdiri daripada motor servo, pengurang, tali pinggang gear, roda tali pinggang gear, tempat duduk galas, gelendong, engkol, peluncur dan peranti pemandu. Pengurang motor memberikan kuasa kepada bahagian yang bergerak. Melalui penghantaran tali pinggang gigi dan aci utama, kuasa dipindahkan ke mekanisme peluncur pemegang engkol untuk merealisasikan pergerakan bahan kerja mengikut sinus.
6. Mekanisme penekan silinder penyerap hentakan: terdiri daripada sensor anjakan, silinder penekan, plat penekan atas, lajur panduan, tapak, dll. Plat penekan atas digerakkan oleh silinder minyak untuk meluncur ke atas dan ke bawah untuk merealisasikan mampatan silinder penyerap hentak. Penderia anjakan digunakan untuk memantau sama ada lejang pemasangan akhbar panduan berada di tempatnya.
7. Alat penunjuk: dengan alat pengapit cepat gelang penyerap hentakan dan alat pengapit silinder penyerap hentak, alat ini menggunakan struktur perubahan pantas. Cincin gantung atas menggunakan struktur umum, dan selepas meletakkan manual, dua jenis pengetatan mekanikal diterima pakai.
8. Sistem hidraulik: terdiri daripada tangki minyak, injap sehala, injap undur, pengatur tekanan, motor, pam minyak, penapis udara, dsb., untuk menyediakan kuasa untuk pengapit bahan kerja dan pengangkatan rasuk atas. Injap pengatur tekanan dan tolok tekanan ditambah masing-masing untuk mengawal dan memaparkan tekanan minyak silinder bicu panduan sistem hidraulik dan silinder bicu gelang angkat.
9. Kad pemerolehan: digunakan untuk pemerolehan dan transformasi isyarat daya dan anjakan.
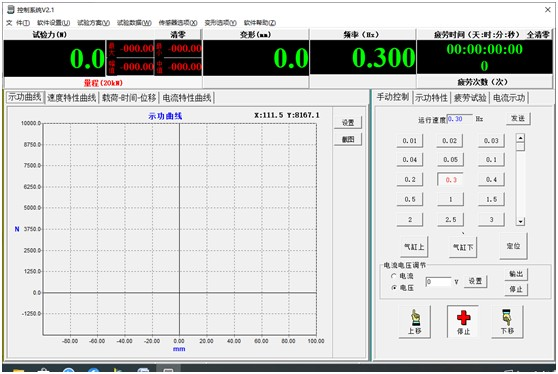
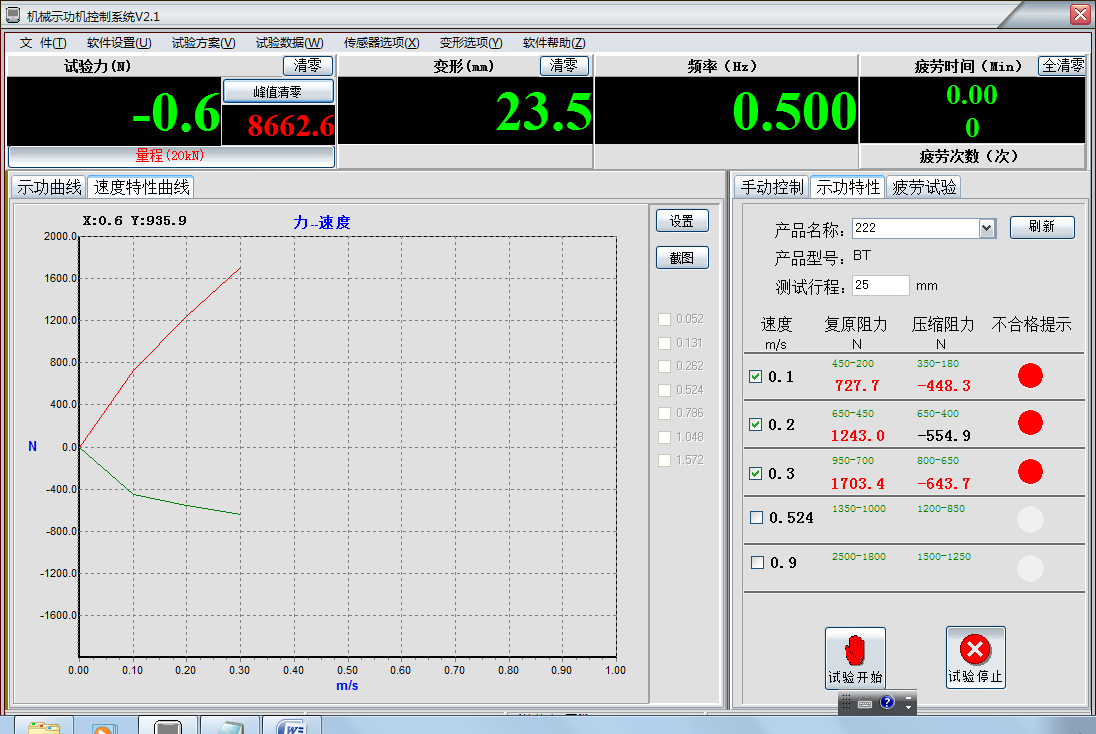
10. Komputer (menggunakan sistem win7): digunakan untuk menerima isyarat pemerolehan kad pemerolehan, dan melalui pemasangan perisian kawalan industri untuk pengiraan, analisis, lukisan rajah P-S dan rajah P-V, paparkan tegangan maksimum dan daya redaman mampatan, tetapkan, had atas dan bawah, penggera paparan skrin yang tidak layak dan memasang paparan lampu isyarat.
11. Sistem kawalan elektrik: oleh pemandu motor servo, komponen elektrik, litar elektrik dan kotak kawalan elektrik dan kumpulan lain. Bersetuju. Manual dan Automatik dua mod pengendalian, peranti menambah suis asal, untuk memastikan penetapan semula kunci.
12. Perisian: fungsi dan ciri sistem ujian prestasi penyerap hentakan:


1) Fungsi penjimatan Tetapan Sistem: sistem ujian boleh menyimpan Tetapan daya dan kelajuan;
2) Fungsi ujian kendiri: boleh menguji sendiri peranti untuk menyemak sama ada peranti itu normal;
3) Fungsi pelarasan operasi: gerakkan tempat penderia anjakan ke atas atau ke bawah kepada sifar penderia anjakan;
4) Fungsi penentukuran penderia: penderia daya, penderia anjakan dan kelajuan boleh ditentukur.
5) Fungsi sifar sensor daya: apabila hujung bawah lekapan pemasangan sensor daya diganti dan sifar sensor daya diperlukan sebelum kawasan ujian pertama setiap hari;
6) Fungsi ujian keadaan tunggal: penyerap hentak boleh diuji dalam keadaan tunggal, ujian manual atau ujian automatik. Selepas percubaan selesai, data eksperimen boleh disimpan, dibaca dan dicetak.
7) Fungsi ujian berbilang keadaan: ujian berbilang keadaan boleh dijalankan pada penyerap hentak, ujian manual atau ujian automatik, selepas percubaan selesai, data eksperimen boleh disimpan, dibaca dan dicetak .
8) Fungsi mengira: bilangan penyerap hentak yang diuji setiap 24 jam (termasuk bilangan produk yang layak dan produk yang tidak layak), dan boleh disimpan, dibaca dan dicetak.
9) Hasil penunjuk boleh menjana laporan (termasuk data, grafik) dan data disimpan dalam fail Excle.
10) Ujian keletihan (ujian memusnahkan boleh dilakukan mengikut keperluan percubaan. Boleh mencapai nombor pratetap fungsi penutupan, lengkung pengecilan nilai daya, pengesanan puncak, dsb.)
11) Ujian kearuhan: di bawah keperluan kelajuan yang sama, arus atau voltan yang berbeza boleh diberikan untuk menguji rintangan pemulihan dan mampatan.
12) Antara muka rujukan perisian:
4. Parameter teknikal peralatan:
1. Nilai kuasa maksimum: 30000N
2. Kelajuan: boleh dilaraskan antara 0.01~1m/s, motor adalah motor servo, ketepatan yang lebih tinggi, melalui pengawal boleh ditetapkan sesuka hati kelajuan yang diperlukan, juga boleh ditetapkan pintasan, untuk mencapai kemudahan penggunaan kelajuan biasa.
3. Perjalanan: 0~150mm (boleh laras manual), paparan perjalanan ujian.
4. Daya redaman maksimum: hanya 1m/s 10000N.
5. Irama: dua mata kelajuan ≤12 saat/keping;
6. Ketepatan ujian: 1%FS
7. Ruang ujian: 900mm
5. Perihalan proses pengeluaran peralatan:
Pasang perkakas mengikut jenis pengeluaran dan laraskan strok mengikut keperluan ujian → hidupkan bekalan kuasa mesin utama dan komputer untuk memasuki program ujian → pada bahagian, tekan butang mula → peranti pengetatan atas silinder meletakkan bahan kerja → mekanisme pemanduan memacu bahan kerja untuk memulakan penunjuk → Sistem paparan melukis gambar rajah penunjuk masing-masing pada antara muka yang sama dan memaparkan maksimum daya redaman tegangan dan mampatan. Bahagian yang tidak layak secara automatik penggera dan memasang paparan lampu isyarat → jadi kerja kitaran berselang-seli.
1. Jenis lekapan penunjuk penggantian bahan kerja yang berbeza.
2. Laraskan kedudukan awal rasuk atas untuk panjang benda kerja yang berbeza.
3. Bahan kerja lejang yang berbeza, laraskan kedudukan sipi.
6. Keperluan kawalan kualiti:
1. Penderia daya (julat pengukuran 2T) itu sendiri ketepatan ulangan 1%FS.
2. Julat penderia anjakan: 0-200mm, ketepatan kedudukan berulangnya sendiri ≥1%FS
3. Boleh menetapkan had atas dan bawah nilai daya, penggera paparan skrin yang tidak layak.
4. Boleh menetapkan had atas dan bawah anjakan pemasangan tekanan panduan, penggera paparan skrin yang tidak layak.
5. Ralat nilai daya pengesanan ialah 1%.
7. Keperluan peralatan proses:
1. Dalam proses pembuatan peralatan, pembekal hendaklah menyediakan Pihak A dengan 1 alatan dan lukisan produk.
2. Prestasi mesin hendaklah memenuhi keperluan lukisan Pihak A.
3. Permukaan perkakas hendaklah dirawat dengan rawatan anti-karat seperti penyaduran hitam atau krom.
4. Peralatan harus mempunyai label.
8. Kawalan mesin dan keperluan keselamatan:
1. Peralatan dengan butang berhenti kecemasan, tingkatkan jeriji dan mulakan dengan kedua-dua tangan.
2. Sistem kawalan elektronik menggunakan kawalan PLC boleh atur cara, voltan kawalan DC24V
3. Bahagian berputar perlindungan pemasangan peralatan.
9. Senarai konfigurasi peranti (Isi mengikut konfigurasi pengeluar sendiri)
| No. | Nama Komponen | Jenama | Spesifikasi |
| 1 | Hos | BeaconAuto | dibangunkan sendiri |
| 2 | Motor servo dan sistem pemacu | Servo Huichuan | 25KW |
| 3 | Pengurangan planet | Shanghai Fengxin | jenis senyap |
| 4 | pam ram | hidraulik daya malar | VPE-F12D-10 |
| 5 | Injap solenoid | Shanghai Huayuan | 4WE6 |
| 6 | Penderia suhu | Guangzhou | -40 darjah ~150 darjah |
| 7 | silinder bicu hidraulik | Tianjin Jiagang | CHTM-SD63*50N-S2 |
| 8 | Penderia beban berketepatan tinggi | disesuaikan khas (jenis kalis kejutan) | Jenis jejari 3T |
| 9 | Penderia anjakan LVDT | Akademi Sains Air Beijing | 200mm |
| 10 | pengawal papan | BeaconAuto | dibangunkan sendiri |
| 11 | perisian kawalan | BeaconAuto | Dibangunkan sendiri |
| 12 | Komputer semua-dalam-satu | Dell/Lenovo | standard |
| 13 | Pencetak | Inkjet A4/HP | standard |
| 14 | Perkakas elektrik yang kuat | jenama barisan pertama domestik | tentatif |
| 15 | Paip minyak tekanan tinggi | import | tentatif |
7. Gunakan syarat dan keperluan persekitaran
1. Julat turun naik voltan bekalan kuasa: 380±15%
2. Sumber udara: ≥4bar, aliran 20L/min
3. Suhu persekitaran kerja: 5~40℃
4. Tapak pemasangan adalah terhad, susun atur satah keseluruhan mesin.
5. Jenama minyak hidraulik: N46












