

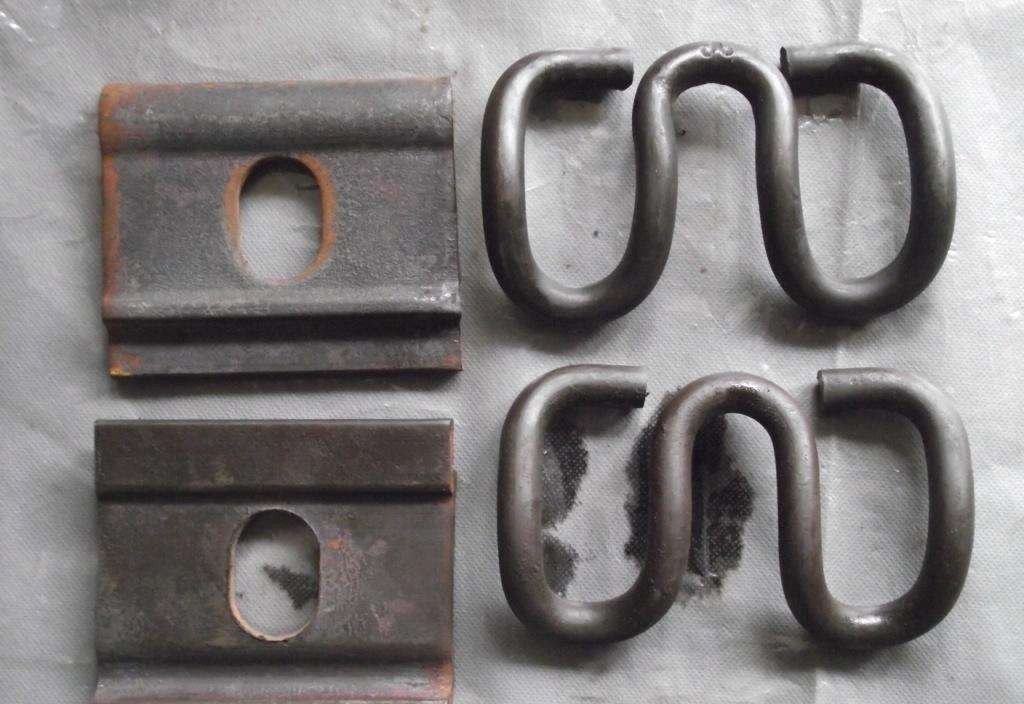
PWS -300 mesin ujian komponen elastik trek servo elektro-hidraulik digunakan terutamanya di makmal untuk menguji kekakuan dinamik, kekakuan statik, dinamik dan statik nisbah, ujian keletihan dan item lain komponen seperti plat kusyen di bawah landasan kereta api. Penggantian aksesori juga sesuai untuk tindakan berterusan dan ujian prestasi mekanikal statik bar elastik dan pengikat.
1. Pengenalan produk
1. Kegunaan utama: Mesin ujian komponen elastik trek servo elektro-hidraulik PWS-300 digunakan terutamanya di makmal untuk menguji kekakuan dinamik, kekukuhan statik, nisbah dinamik dan statik, ujian keletihan dan item lain komponen seperti plat kusyen di bawah landasan kereta api. Penggantian aksesori juga sesuai untuk tindakan berterusan dan ujian prestasi mekanikal statik bar elastik dan pengikat.
2. Pengenalan projek: Mesin ujian boleh melengkapkan projek ujian:
2.1 Ujian kekukuhan statik;
2.2. Ujian kekakuan dinamik;
2.3. Ujian nisbah kekukuhan dinamik dan statik;
2.4. Ujian keletihan.
3. Produk memenuhi piawaian, kaedah ujian dan asas reka bentuk:
4.1, "Kaedah ujian keletihan pemasangan pengikat TB/T2491-1994";
4.2, piawaian Eropah "EN 13146-4:2002 Aplikasi kereta api - kaedah ujian sistem pengikat trek";
4.3, "TB/T2326-1992 konkrit prategasan kaedah ujian kelesuan rasuk disokong ringkas kaedah ujian keletihan pemasangan pemasangan"
4.4 Syarat Teknikal Khas Sistem Pengikat Kementerian Keretapi Laluan Khas Penumpang
4.5, "TB/T1878-2002 Kaedah ujian kelesuan tidur konkrit prategasan";
4.6, "GB/T2611-2007 keperluan teknikal umum mesin ujian";

2. Penerangan Skim
Mesin ujian keletihan komponen elastik trek servo elektrohidraulik WS-300 terdiri daripada enjin utama (penggerak linear servo 300kN), pam servo tekanan malar 11.901 (90L/min), mekanisme pengukur ubah bentuk, satu saluran pengawal servo dinamik digital penuh DTC-200s dan perisian ujian yang berkaitan dan aksesori lain yang diperlukan.


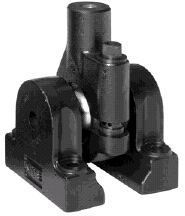
Dilampirkan: Foto produk yang serupa (tertakluk kepada yang sebenar)
Pengenalan unit struktur:
1. Mesin utama: mesin utama ialah struktur rangka empat lajur (saduran elektrik), penggerak linear servo diletakkan di atas.
1.1. Rasuk mengguna pakai angkat hidraulik, pengapit hidraulik dan struktur pelepasan elastik untuk memastikan kestabilan dan kebolehpercayaan ujian, dan memastikan rasuk kekal terkunci dalam keadaan bukan ujian;
1.2. Bentuk rasuk mempunyai deria tiga dimensi, cantik dan murah hati. Pengangkatan rasuk mengamalkan pengangkatan hidraulik, mudah dikendalikan;
1.3. Permukaan luar lajur dirawat dengan penyaduran kromium keras untuk meningkatkan keupayaan anti-karat;
1.4. Modul hidraulik pergerakan rasuk menggunakan injap undur manual khas untuk memastikan kestabilan dan kebolehpercayaan ujian frekuensi tinggi;
1.5. Silinder pengapit menggunakan reka bentuk modul, dan elemen pengedap menggunakan elemen pengedap berkelajuan tinggi khas yang diimport dari Jerman untuk memastikan operasi jangka panjang dan kebolehpercayaan mesin ujian.
1.6. Bahagian hadapan penjepit sampel reka bentuk mesin utama, pergerakan rasuk dan butang operasi berhenti kecemasan, mudah dikendalikan.
2. Penggerak linear servo elektro-hidraulik: penggerak linear servo elektro-hidraulik digunakan untuk ujian pemuatan dinamik dan statik bagi tegangan, mampatan dan sifat mekanikal yang lain. Penggerak menggunakan sistem servo gelung tertutup termaju untuk mengawal kelajuan, tujahan dan kedudukan yang diperlukan untuk ujian dengan tepat. Penggerak mempunyai sensor kedudukan terbina dalam dengan ketepatan kawalan sehingga 0.05mm. Ciri struktur penggerak:
2.1. Penggerak menggunakan rod berganda, struktur tindakan berganda, yang boleh memberikan kapasiti tampung yang tinggi, kelajuan pergerakan tinggi dan hayat ultra-panjang. Penggerak linear servo mempunyai ciri-ciri redaman rendah, tindak balas tinggi, hayat tinggi dan reka bentuk jurang yang besar. Sokongan rod omboh diperbuat daripada sokongan bukan logam dan mempunyai ciri-ciri pelinciran diri berkelajuan tinggi tanpa simpulan. Komponen pengedap semuanya diimport dari Jerman.
2.2. Penggerak menggunakan pasangan kawalan injap servo empat hala simetri yang dipanggil reka bentuk prinsip penggerak. Kedudukan had amplitud penggerak linear servo direka dengan penimbal hidraulik untuk mengelakkan kehabisan kawalan dan menyebabkan kerosakan. Respons frekuensi penggerak linear servo tidak kurang daripada 100Hz.
2.3. Konfigurasikan injap servo HY150, kadar alir 56 liter/minit empat injap servo port minyak.
2.4. Konfigurasi penderia beban paksi Wiss - Shiquan Amerika Syarikat, pemasangan sepaksi skala penuh terbina dalam penderia anjakan LVDT.
2.5. Penggerak dan sampel disambungkan dengan peranti anti-balas (engsel bola tiga dimensi), nilai daya dipusatkan secara automatik, mengurangkan daya sisi, mengurangkan kesan ujian frekuensi tinggi, dan memperbaiki bentuk gelombang ujian. Untuk meminimumkan kerosakan penggerak daripada daya sisi spesimen, struktur sokongan bersama menggunakan reka bentuk modular, dan kelegaan galas sokongan bersama boleh dilaraskan selepas haus untuk memastikan operasi fleksibel sistem ujian.
Gambar yang dilampirkan: engsel bola tiga dimensi
3. Sistem kawalan: komposisi dan fungsi perkakasan sistem kawalan digital penuh: perkakasan terdiri daripada empat bahagian: mikrokomputer, pengawal digital penuh, panel kawalan manual dan aksesori.
3.1. Mikrokomputer menyediakan persekitaran kerja asas untuk perisian sistem kawalan digital penuh, termasuk menyediakan pengendali antara muka dialog manusia-mesin yang mesra, mengurus pengawal digital penuh untuk mengawal proses ujian, mengumpul, menyimpan dan menganalisis data ujian. Komputer kawalan industri biasanya dipilih, yang mempunyai keupayaan anti-gangguan yang baik.
3.2. Pengawal digital penuh ialah bahagian perkakasan teras sistem kawalan, dan kawalan masa nyata mesin ujian diselesaikan oleh pengawal digital penuh. Pengawal mengawal bilangan saluran: 1, disambungkan kepada 2 penderia, sesuai untuk pelbagai jenis mesin ujian, dan boleh ditukar secara dinamik dengan lancar antara pelbagai mod kawalan. Ketepatan penukaran pengawal A/D dan D/A ialah 16 bit, dan kadar kemas kini data kawalan gelung tertutup ialah 10 ribu kali/saat. Komponen utama ialah: unit CPU, unit pengawal selia sensor, unit kawalan injap servo, unit kawalan sumber hidraulik, unit input/output isyarat analog dan unit input/output isyarat digital. Unit CPU dengan mikropemproses titik terapung 32-bit berprestasi tinggi sebagai teras, penjana fungsi set, pemilih maklum balas, pembanding dan aritmetik PIDF digital dalam satu.
Penjana fungsi boleh mengeluarkan voltan DC, gelombang sinus segmen tunggal, gelombang segi tiga segmen tunggal, gelombang sinus, gelombang segi tiga dan gelombang persegi, serta sebarang kombinasi bentuk gelombang di atas (gelombang rawak), frekuensi keluaran bentuk gelombang julat 1×10-5Hz ~ 50Hz. Bentuk gelombang dan amplitud isyarat keluaran penjana fungsi boleh diubah secara bebas oleh kawalan perisian mengikut keperluan ujian. Aritmetik titik terapung ketepatan tunggal digunakan untuk menjana bentuk gelombang penjana fungsi. Aritmetik PIDF digital menggunakan operasi titik terapung ketepatan tunggal, kadar kemas kini operasi PIDF digital sebanyak 10 ribu kali/saat.
Unit pengatur penderia boleh dibahagikan kepada pengatur DC dan pengatur AC, Pengatur DC digunakan terutamanya untuk penderia beban, tolok terikan dan penderia tekanan minyak, Pengatur AC digunakan terutamanya untuk mengukur LVDT anjakan. Voltan pengujaan dan penguat pengawal selia boleh diprogramkan perisian, setiap pengawal selia boleh dibahagikan kepada fail percuma, dan suis antara setiap fail semuanya dikawal oleh perisian, dan isyarat sensor yang dikuatkan ditukar kepada A/D dan dihantar ke Unit CPU untuk digunakan. Ketepatan penukaran A/D pengawal selia ialah 16 bit, dan kelajuan penukaran ialah 10 ribu kali/saat.
Unit pemacu injap sesuai untuk semua jenis injap servo elektro-hidraulik, dan ketepatan penukaran D/A unit pemacu injap ialah 16 bit.
Unit kawalan sumber hidraulik digunakan untuk mengawal hentian kerja sumber hidraulik dan penukaran tekanan tinggi dan rendah.
Unit input/output isyarat analog menyediakan input/output isyarat analog yang boleh diprogramkan perisian, julat input/output isyarat ialah ±10V, ketepatan ialah 16 bit, setiap satu mengandungi 4 saluran, menyediakan pemerolehan dan kawalan data tambahan fungsi untuk pengawal.
Unit input/output isyarat digital menyediakan input/output isyarat digital TTL yang boleh diprogramkan perisian, setiap satu mengandungi 16 saluran, untuk menyediakan fungsi pemerolehan dan kawalan data tambahan untuk pengawal.
3.3. Panel kawalan manual digunakan terutamanya untuk kawalan manual sumber hidraulik dan mesin ujian, seperti menukar pam minyak dan memuat/memunggah sampel.
3.4 Komposisi dan fungsi perisian kawalan pengawal: Perisian kawalan pengawal adalah semua antara muka bahasa Cina. Fungsi utamanya adalah untuk menyediakan antara muka dialog manusia-mesin yang mesra, mengawal proses ujian, merekod/menganalisis data secara automatik, mencetak keputusan ujian, menyediakan antara muka pengaturcaraan lanjutan untuk kakitangan ujian dan menentukur sensor. Keupayaan kerja dan tahap automasi mesin ujian dicerminkan terutamanya oleh perisian ujian. Persekitaran berjalan bagi perisian kawalan ialah WindowsXP. Perisian kawalan dibahagikan kepada perisian pengurusan sistem, perisian ujian dan perisian antara muka.
3.5. Perisian pengurusan sistem pengawal adalah asas kepada keseluruhan kerja sistem kawalan digital, fungsi utamanya adalah untuk mengurus sumber perkakasan sistem kawalan, menentukan julat sensor, menentukan saluran kawalan, menentukan mod kawalan, pelarasan parameter PIDF digital, set perlindungan, paparkan mod kawalan semasa, status penjana hidraulik dan fungsi serta penentukuran sensor, Osiloskop digital jejak dwi, ammeter injap servo digital dan 6 voltmeter digital disediakan untuk paparan masa nyata data ujian.
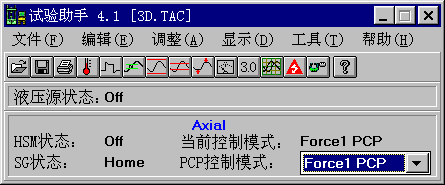
Rajah: Antara muka utama perisian pengurusan sistem pembantu ujian
Perisian pengurusan sistem boleh dikonfigurasikan dengan tiga jenis perlindungan, iaitu, perlindungan luaran, perlindungan dalaman dan perlindungan ketepuan. Tiga jenis perlindungan di atas boleh disediakan secara bebas untuk setiap penderia atau saluran kawalan. Semasa ujian, mengikut ciri ujian, beberapa perlindungan boleh disediakan, dan perisian boleh secara automatik dan cepat menghentikan kerja penjana fungsi, injap servo dan sumber hidraulik apabila bahaya akan berlaku (seperti patah spesimen), untuk memastikan peralatan ujian tidak cedera.
Osiloskop digital dwi-jejak digunakan untuk memaparkan atau mencetak bentuk gelombang maklum balas penderia, ralat dan isyarat arahan dalam masa nyata semasa ujian. Voltmeter digital digunakan terutamanya untuk memaparkan nilai puncak, lembah, maksimum, minimum dan semasa bagi maklum balas sensor, ralat dan isyarat arahan dalam masa nyata semasa ujian. Terdapat 6 voltmeter digital kesemuanya. Rajah 7 ialah rajah antara muka osiloskop digital. Rajah 8 ialah rajah antara muka voltmeter digital.
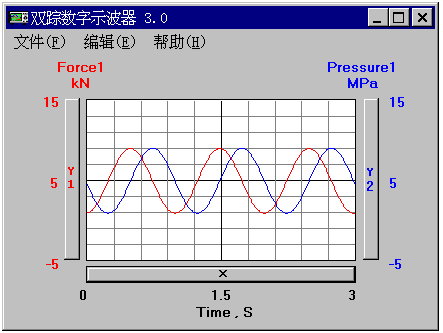
Gambar rajah antara muka osiloskop
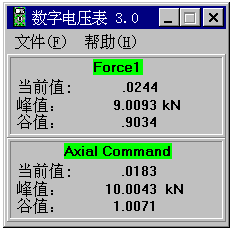
rajah antara muka voltmeter digital
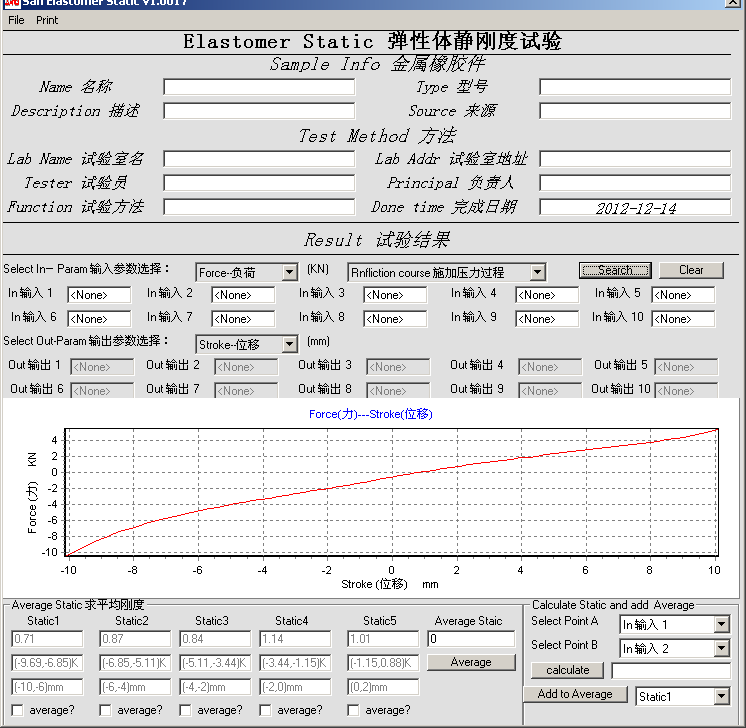
3.6. Perisian ujian direka khas untuk menyelesaikan jenis atau kelas ujian tertentu dan direka secara berasingan, dengan kerjasama perisian sistem, penggunaan pelbagai fungsi yang disediakan oleh pengawal digital penuh untuk mengawal proses keseluruhan ujian, dan secara automatik merekod/menganalisis data ujian dan mencetak keputusan ujian.
Perisian ujian terutamanya ditulis mengikut beberapa fungsi biasa atau kaedah ujian standard, yang terutamanya termasuk: perisian penjana fungsi, perisian ujian statik, perisian ujian prestasi patah, perisian ujian keletihan kitaran rendah.
Perisian penjana fungsi digunakan terutamanya dalam ujian amplitud malar. Perisian penjana fungsi automatika lly menjejak dan membetulkan nilai puncak dan lembah kuantiti kawalan (seperti beban) untuk memastikan kawalan ralat sepanjang ujian. Semasa ujian, pengendali boleh menukar nilai puncak, nilai lembah dan kekerapan secara dinamik, dan juga boleh menjalankan pegangan isyarat manual atau automatik. Jika selang kitaran penahanan isyarat automatik ditetapkan, perisian akan secara automatik mengekalkan isyarat pada tahap yang ditetapkan untuk setiap selang kitaran tambahan, untuk memudahkan pengukuran beberapa data ujian (seperti panjang retak visual). Bentuk gelombang pilihan perisian adalah gelombang sinus, gelombang segitiga dan gelombang persegi. Simpan data penting selepas ujian.
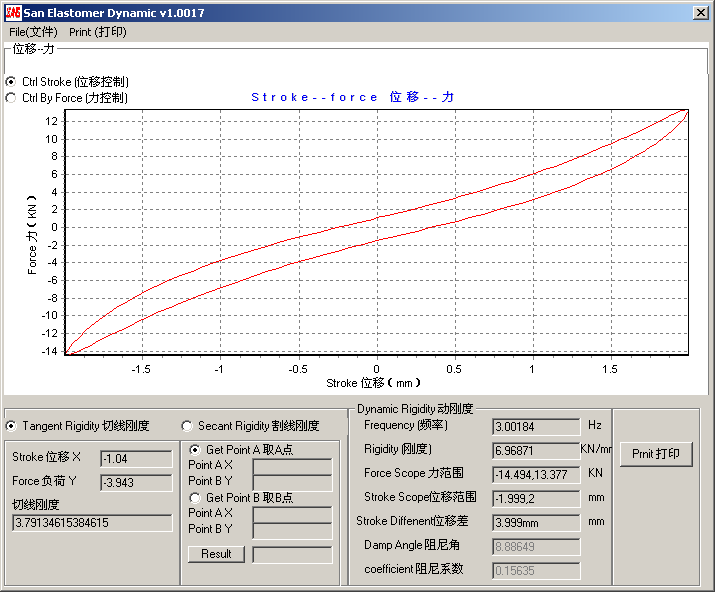
Rajah dilampirkan: Antara muka perisian laporan ujian kekukuhan dinamik dan statik
4. Stesen pam servo tekanan malar: terutamanya oleh plat bawah, tangki bahan api, unit elektrik pam minyak, blok injap, saluran paip, sistem penyejukan dan bahagian lain.
4.1. Tangki stesen pam menggunakan reka bentuk tertutup sepenuhnya, yang boleh menghalang kekotoran luaran daripada memasuki sistem hidraulik dengan berkesan untuk mencemarkan minyak hidraulik.
4.2. Pam minyak dan unit elektrik dikonfigurasikan dengan sokongan anjal berganda secara bersiri untuk mengurangkan lagi bunyi stesen pam.
4.3. Stesen pam dilengkapi dengan motor AC bunyi rendah, pam gear dalaman konjugat linear hingar rendah.
4.4. Modul hidraulik pensuisan lembut tekanan tinggi dan rendah yang terdiri daripada injap pelega utama, penumpuk, injap pelega utama sekunder, injap pelega sekunder dan injap undur, dan tidak lebih daripada penapis minyak ketepatan 3u digunakan untuk melaraskan tekanan sistem keluaran stesen pam;
4.5. Blok injap juga mempunyai permulaan tekanan rendah, fungsi pensuisan tekanan tinggi, berkesan boleh menghalang kesan mesin pensuisan sistem hidraulik;
4.6. Stesen pam dilengkapi dengan penyejuk minyak untuk penyejukan sistem hidraulik;
4.7. Stesen pam dilengkapi dengan hos tekanan tinggi yang diimport untuk memastikan sistem tidak mengalami kebocoran;
4.8. Stesen pam dilengkapi dengan meter kawalan suhu sentuhan elektrik berganda, meter kawalan paras cecair, penderia tekanan dan penderia lain yang diperlukan; Dengan suhu minyak (di bawah 10ºC, lebih tinggi daripada 55ºC), paras cecair, penggera tersumbat penapis minyak, perlindungan beban motor dan fungsi penggera keselamatan yang lain.
4.9. Dengan litar kawalan mula-henti motor, litar penggera sumber minyak, litar paparan status. Litar kawalan mula-henti motor terdiri daripada mula, henti, henti kecemasan dan litar penukaran voltan tinggi dan rendah. Litar penggera sumber minyak terdiri daripada penggera melebihi had suhu, litar penggera tersumbat penapis minyak, litar penggera paras cecair rendah, dsb. Konfigurasikan fungsi mula dan berhenti jauh, dan atur butang berhenti kecemasan di dalam bilik kawalan penggerak hidraulik dan di sebelah hidraulik. penggerak.

Dilampirkan: Foto stesen pam tekanan berterusan
5. Mekanisme pengukuran anjakan: digunakan untuk mengukur ubah bentuk sampel di bawah beban yang ditentukan, diletakkan pada permukaan sampel, secara langsung dan tepat mengukur ubah bentuk sebenar sampel, dan memaparkan nilai anjakan dan nilai daya mesin ujian dalam masa nyata, dan lukis lengkung yang sepadan melalui perisian ujian. Terdapat dua set mekanisme pengukur anjakan dalam sistem ujian, yang digunakan dalam ujian kekakuan dan ujian rintangan membujur rel masing-masing. Setiap mekanisme pengukuran mengandungi 4 penderia anjakan ketepatan, dan kedudukan mengukur boleh digerakkan sewenang-wenangnya untuk memenuhi keperluan kedudukan mengukur dalam Kaedah Ujian. Sensor anjakan menggunakan sensor anjakan magnetostrictive, julat ukuran: ±5.08mm, julat frekuensi :400Hz hingga 5KHz, suhu operasi :-55℃ ~ 150℃, toleransi getaran :20g/2KHz. Sensor anjakan mempunyai ciri pengujaan frekuensi lebar, voltan keluaran tinggi, cangkang keluli tahan karat magnetik boleh melindungi elektrik elektromagnet dan statik, dan keupayaan anti-gangguan yang kuat. Sensor anjakan kecil mempunyai ketepatan pengukuran yang tinggi dan boleh mengukur ubah bentuk sebenar sampel dengan tepat. Data UJIAN dimasukkan terus ke dalam sistem kawalan MTS FLEX TEST 60, dan perisian ujian boleh membentuk lengkung ujian secara bebas atau nilai purata bagi sebarang bilangan penderia anjakan mengikut keperluan ujian.
6. Unit penyejukan minyak: digunakan untuk menguji penyejukan sistem hidraulik mesin, ciri utama:
6.1. Skrin sentuh warna sebenar HD 5-inci, sentuhan sensitif, operasi mudah, paparan dinamik status operasi unit;
6.2 Fungsi pemasaan mingguan boleh mengurus suhu dengan berkesan dan masa mula dan berhenti unit boleh ditetapkan secara bebas dalam masa seminggu;
6.3. Unit berjalan untuk masa tertentu, secara automatik mengingatkan penyelenggaraan, menjimatkan kebimbangan pengurusan;
6.4. Operasi pemantauan dinamik: secara automatik memaparkan status operasi pemampat, status kerja sepintas lalu;
6.5. Kawalan automatik jauh, mengikut suhu sistem hidraulik secara automatik menentukan keadaan kerja;
6.6. Fungsi diagnosis diri, secara automatik menentukan punca kerosakan.
7. Konfigurasi lain yang diperlukan:
Dilengkapi dengan set alat penentukuran untuk menentukur penderia beban;
Dilengkapi dengan 1 set aksesori mampatan;
Siram aksesori untuk penggerak servo dan stesen pam servo tekanan malar;
Semua kelengkapan paip hidraulik dan hos tekanan tinggi adalah produk import untuk memastikan keseluruhan sistem tidak bocor minyak;
Peralatan dan perisian ujian kekukuhan dinamik
Aksesori lain yang diperlukan.
3. Penunjuk prestasi teknikal utama
1. Daya ujian statik maksimum: ±300kN;
2. Ketepatan paparan statik: ±0.5% (2%-100%);
3. Daya ujian dinamik maksimum: ±300kN;
4. Kemeruapan dinamik: ±1%FS.
5. Amplitud maksimum penggerak: ±50mm, menunjukkan ketepatan ±0.5%FS.
6. Julat frekuensi: 0.01-30Hz;
7. Mod kawalan: beban, anjakan, mod kawalan ubah bentuk, bentuk gelombang ujian utama: disokong oleh pengawal (termasuk gelombang sinus, gelombang persegi, gelombang segitiga, gelombang serong dan bentuk gelombang input luaran);
8. Ruang ujian maksimum: 550mm;
9. Daya ujian, anjakan, ubah bentuk tiga gelung kawalan gelung tertutup. Ia mempunyai fungsi pensuisan lancar mod kawalan tanpa gangguan.
10. Stesen pam: aliran undian 90L/min, kuasa motor: 37kW
11. Ciri amplitud dan frekuensi: memenuhi frekuensi 4Hz, amplitud ±5mm;
4. Senarai konfigurasi:
| No. | Konfigurasi Nama | Spesifikasi | pengeluar | Nombor |
| 1 | Rak hos 300 kN | BeaconAuto | 1 set | |
| 2 | Penggerak | 150KN | BeaconAuto | 1 set |
| 3 | Elemen pengedap penggerak | Jerman Busak+Shamban | 1 set | |
| 4 | Penderia beban | 300kN | Viss Amerika Syarikat -- Shiquan | 1 set |
| 5 | Injap servo | 63L/min | HY150 | 2 set |
| 6 | Penderia anjakan | ±50mm | Penderia Schaevitz Amerika | 1 set |
| 7 | Ujian aksesori | BeaconAuto | 1 set | |
| 8 | Peranti pengukur ubah bentuk | ±5 mm | AML150 | 4 set |
| 9 | Modul pemacu hidraulik | BeaconAuto | 1 set | |
| 10 | Pengawal servo saluran tunggal | BeaconAuto | 1 set | |
| 11 | Komputer | Komputer industri Advantech | 1 set | |
| 12 | Pencetak | Pencetak laser A4 | Syarikat HP | 1 set |
| 13 | Bendalir penyambung | import | 1 set | |
| 14 | Basuh lampiran | BeaconAuto | 1 set | |
| 15 | Muatkan alat penentukuran | BeaconAuto | 1 set | |
| 16 | perisian khas kekukuhan dinamik | BeaconAuto | 1 set | |
| 17 | Bekalan kuasa UPS | Sante | 1 set |
Senarai konfigurasi stesen pam:
| No. | Konfigurasi Nama | Spesifikasi | pengeluar | Nombor |
| 1 | tangki | BeaconAuto | 1 set | |
| 2 | Pam minyak | 90L/min | NACHI Jepun | 1 set |
| 3 | Motor | 37kW | motor Anhui selatan | 1 set |
| 4 | Injap pelega utama | NZCHI Jepun | 1 set | |
| 5 | injap pelega utama tambahan, injap pelega tambahan dan injap undur | Lixin | 1 set | |
| 6 | unit penyejuk minyak | Shanghai Kangsai | 1 set | |
| 7 | meter kawalan suhu sentuhan elektrik dua kali | Tianjin Affdi | 1 set | |
| 8 | Akumulator | Wenzhou | 1 set | |
| 9 | Aksesori hidraulik lain | Wenzhou del | 1 set | |
| 10 | Penyambung bendalir | import | 1 set | |
| 11 | Basuh lampiran | BeaconAuto | 1 set | |
| 12 | kabinet elektrik yang kukuh | BeaconAuto | 1 set | |
| 13 | Elemen penapis ganti | Pengapuran Wenzhou | 3 |
















































